Linear Algebra for Image Manipulation
Swipe to show menu
Linear algebra plays a crucial role in image processing. Since digital images are represented as matrices of pixel values, mathematical operations like transformations, scaling, and rotations can be performed using matrix manipulations. Let's break down the essential linear algebra concepts used in computer vision.
Image Representation as Matrices
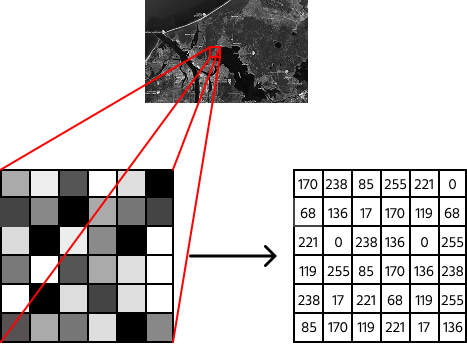
A digital image is essentially a grid of pixels, and each pixel has an intensity value. In grayscale images, this is a 2D matrix, where each entry corresponds to a brightness level (0 for black, 255 for white). For example, a simple 6×6 grayscale image might look like this:
Color images, on the other hand, are 3D matrices (also called tensors), with separate layers for Red, Green, and Blue (RGB).
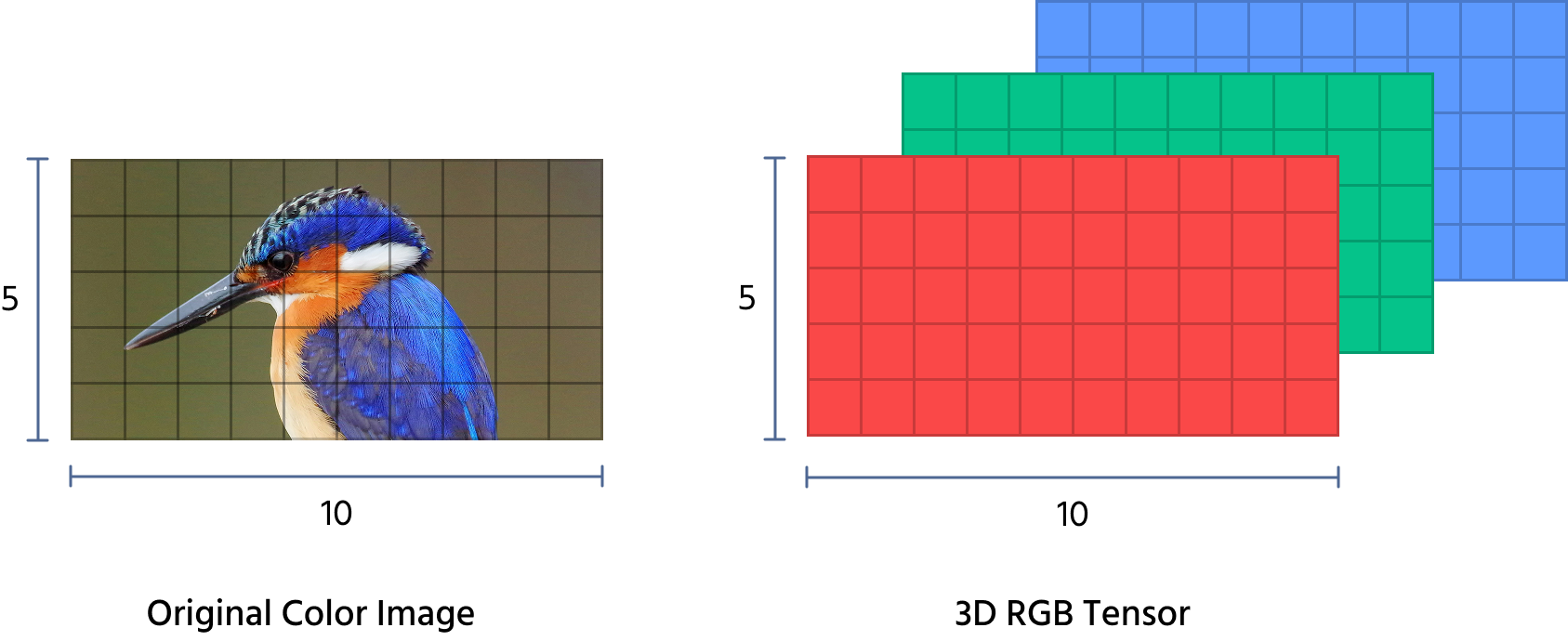
A tensor is a general term for a multi-dimensional array of numbers. Vectors (1D) and matrices (2D) are special cases of tensors. In general, tensors can have any number of dimensions and serve as the foundational structure for representing data in many computer vision and machine learning applications.
Grayscale images have a shape of (60, 60), which means they consist of 60 rows and 60 columns, with each pixel representing a single intensity value - there is only one color channel. In contrast, RGB images have a shape of (60, 60, 3), indicating the same spatial resolution (60 rows and 60 columns), but with an additional dimension for color: each pixel contains three values corresponding to the red, green, and blue channels that together define the full color at that point.
Linear Algebra Transformations for Image Processing
Several image manipulations rely on matrix operations, making linear algebra a core part of computer vision. Let's go through the most commonly used transformations.
Image Scaling (Resizing)
Scaling increases or decreases the size of an image. It is achieved by multiplying the image matrix by a scaling matrix:
where sx and sy are scaling factors for the width and height, respectively. Example: If we want to double the size of an image, we use:
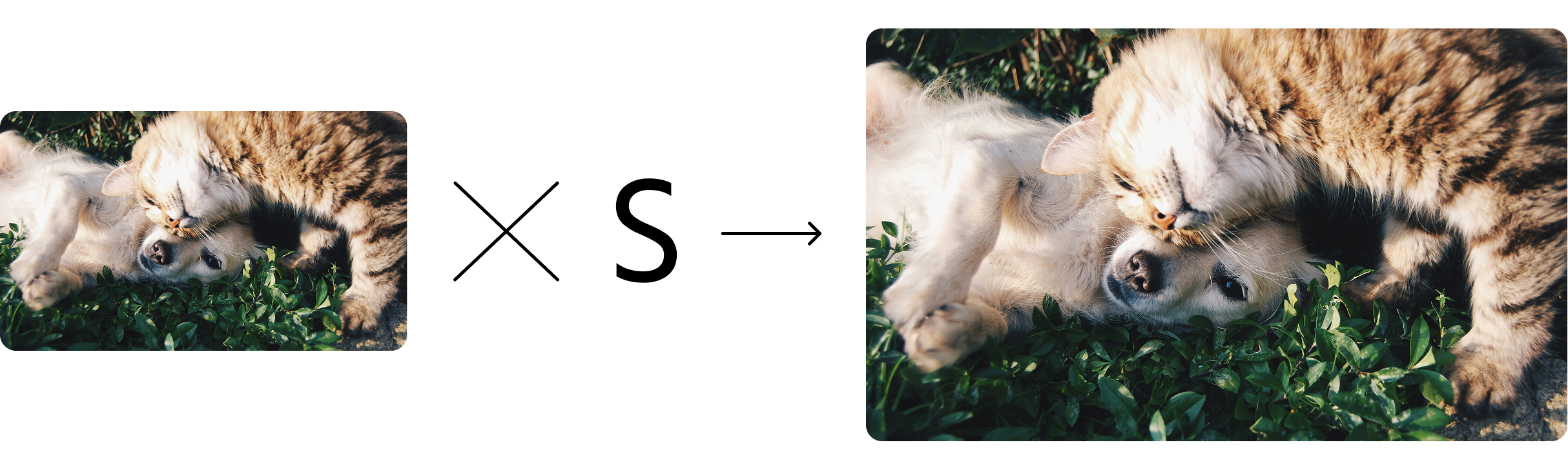
Multiplying this matrix by each pixel's coordinates scales the image up.
Image Rotation
To rotate an image by an angle θ, we use a rotation matrix:
For example, rotating an image 90 degrees clockwise means using:
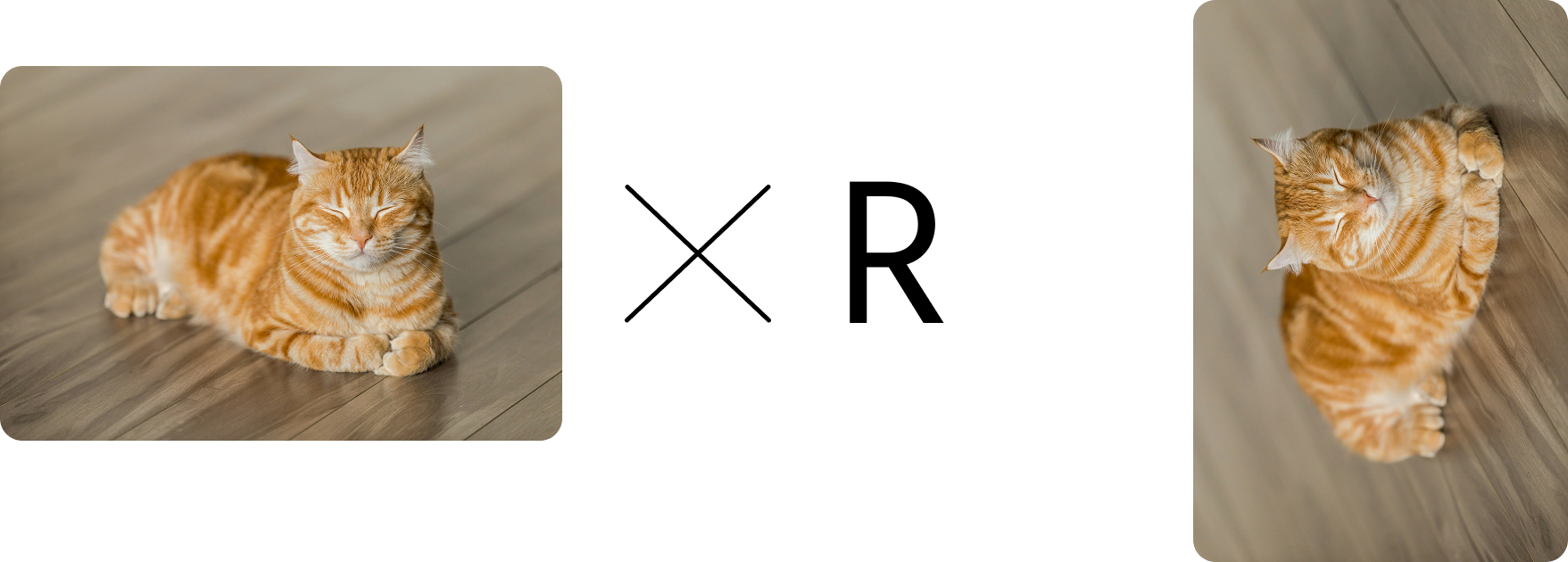
Applying this transformation moves each pixel to a new position, effectively rotating the image.
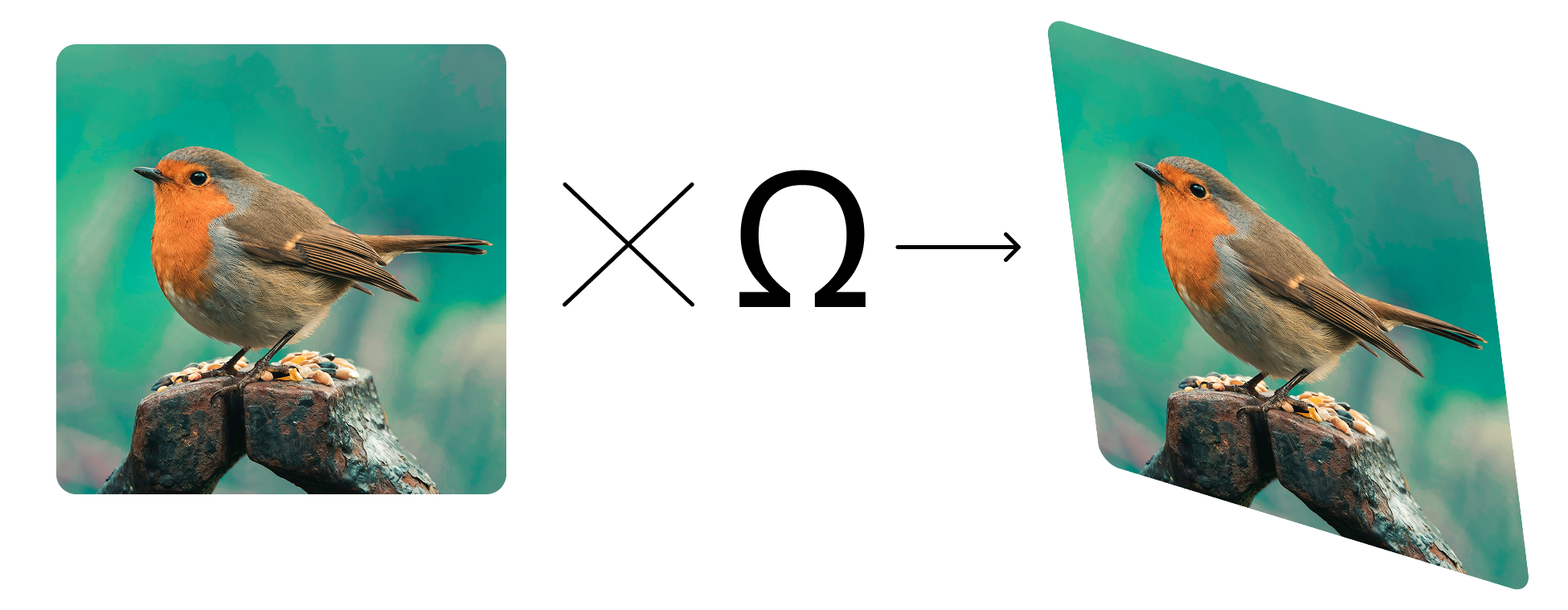
Shearing (Skewing an Image)
Shearing distorts an image by shifting its rows or columns. The shearing transformation matrix is:
where ωx and ωy define how much the image is skewed horizontally and vertically. Shifting an image 30% horizontally and 20% vertically:
Why Linear Algebra Matters in Computer Vision
Linear algebra is the backbone of many image processing tasks, including:
- Object detection (bounding boxes rely on transformations);
- Face recognition (eigenvectors and PCA for feature extraction);
- Image enhancement (filtering uses matrix convolutions);
- Neural networks (weights are stored as matrices).
By understanding these fundamental operations, we can manipulate images effectively and build more advanced computer vision applications.
Thanks for your feedback!
Ask AI
Ask AI

Ask anything or try one of the suggested questions to begin our chat
Linear Algebra for Image Manipulation
Linear algebra plays a crucial role in image processing. Since digital images are represented as matrices of pixel values, mathematical operations like transformations, scaling, and rotations can be performed using matrix manipulations. Let's break down the essential linear algebra concepts used in computer vision.
Image Representation as Matrices
A digital image is essentially a grid of pixels, and each pixel has an intensity value. In grayscale images, this is a 2D matrix, where each entry corresponds to a brightness level (0 for black, 255 for white). For example, a simple 6×6 grayscale image might look like this:
Color images, on the other hand, are 3D matrices (also called tensors), with separate layers for Red, Green, and Blue (RGB).
A tensor is a general term for a multi-dimensional array of numbers. Vectors (1D) and matrices (2D) are special cases of tensors. In general, tensors can have any number of dimensions and serve as the foundational structure for representing data in many computer vision and machine learning applications.
Grayscale images have a shape of (60, 60), which means they consist of 60 rows and 60 columns, with each pixel representing a single intensity value - there is only one color channel. In contrast, RGB images have a shape of (60, 60, 3), indicating the same spatial resolution (60 rows and 60 columns), but with an additional dimension for color: each pixel contains three values corresponding to the red, green, and blue channels that together define the full color at that point.
Linear Algebra Transformations for Image Processing
Several image manipulations rely on matrix operations, making linear algebra a core part of computer vision. Let's go through the most commonly used transformations.
Image Scaling (Resizing)
Scaling increases or decreases the size of an image. It is achieved by multiplying the image matrix by a scaling matrix:
where sx and sy are scaling factors for the width and height, respectively. Example: If we want to double the size of an image, we use:
Multiplying this matrix by each pixel's coordinates scales the image up.
Image Rotation
To rotate an image by an angle θ, we use a rotation matrix:
For example, rotating an image 90 degrees clockwise means using:
Applying this transformation moves each pixel to a new position, effectively rotating the image.
Shearing (Skewing an Image)
Shearing distorts an image by shifting its rows or columns. The shearing transformation matrix is:
where ωx and ωy define how much the image is skewed horizontally and vertically. Shifting an image 30% horizontally and 20% vertically:
Why Linear Algebra Matters in Computer Vision
Linear algebra is the backbone of many image processing tasks, including:
- Object detection (bounding boxes rely on transformations);
- Face recognition (eigenvectors and PCA for feature extraction);
- Image enhancement (filtering uses matrix convolutions);
- Neural networks (weights are stored as matrices).
By understanding these fundamental operations, we can manipulate images effectively and build more advanced computer vision applications.
Thanks for your feedback!
