Lineær Algebra til Billedmanipulation
Stryg for at vise menuen
Lineær algebra spiller en afgørende rolle i billedbehandling. Da digitale billeder repræsenteres som matricer af pixelværdier, kan matematiske operationer som transformationer, skalering og rotationer udføres ved hjælp af matrixmanipulationer. Lad os gennemgå de væsentlige lineære algebraiske begreber, der anvendes i computer vision.
Billedrepræsentation som matricer
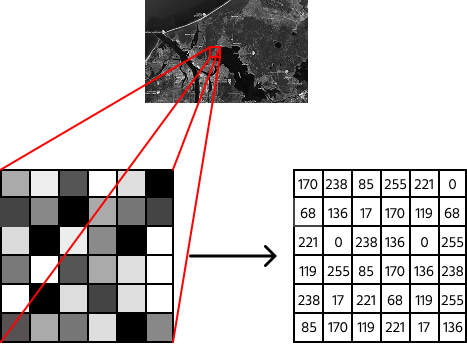
Et digitalt billede er i bund og grund et gitter af pixels, og hver pixel har en intensitetsværdi. I gråtonebilleder er dette en 2D-matrix, hvor hver post svarer til et lysstyrkeniveau (0 for sort, 255 for hvid). For eksempel kan et simpelt 6×6 gråtonebillede se sådan ud:
Farvebilleder er derimod 3D-matricer (også kaldet tensorer), med separate lag for Rød, Grøn og Blå (RGB).
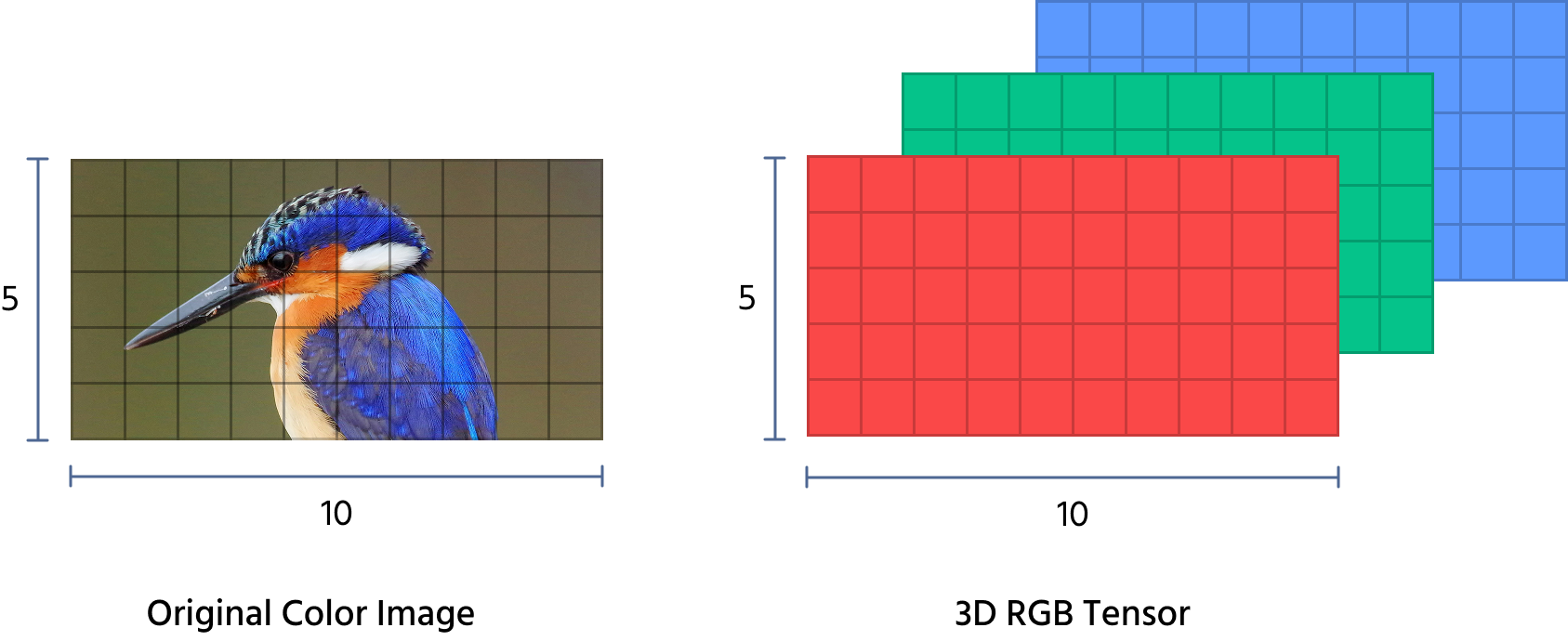
En tensor er en generel betegnelse for et multidimensionelt array af tal. Vektorer (1D) og matricer (2D) er særlige tilfælde af tensorer. Generelt kan tensorer have et vilkårligt antal dimensioner og fungerer som den grundlæggende struktur til at repræsentere data i mange computer vision- og maskinlæringsapplikationer.
Gråtonede billeder har en form på (60, 60), hvilket betyder, at de består af 60 rækker og 60 kolonner, hvor hver pixel repræsenterer en enkelt intensitetsværdi – der er kun én farvekanal. Til sammenligning har RGB-billeder en form på (60, 60, 3), hvilket angiver den samme rumlige opløsning (60 rækker og 60 kolonner), men med en ekstra dimension for farve: hver pixel indeholder tre værdier, der svarer til de røde, grønne og blå kanaler, som tilsammen definerer den fulde farve på det pågældende punkt.
Lineær algebra-transformationer til billedbehandling
Flere billedmanipulationer er baseret på matrixoperationer, hvilket gør lineær algebra til en central del af computer vision. Her gennemgås de mest anvendte transformationer.
Billedskalering (Ændring af størrelse)
Skalering øger eller mindsker størrelsen på et billede. Dette opnås ved at multiplicere billedmatricen med en skaleringsmatrix:
hvor sx og sy er skaleringsfaktorer for henholdsvis bredden og højden. Eksempel: Hvis vi vil fordoble størrelsen på et billede, bruger vi:
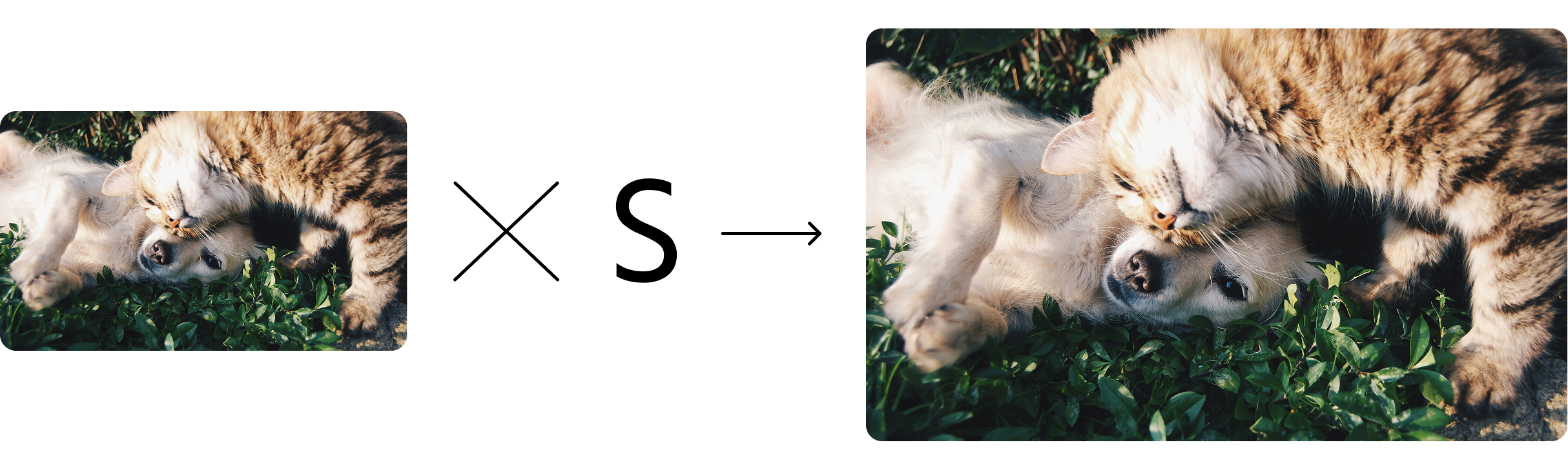
Multiplikation af denne matrix med hver pixels koordinater skalerer billedet op.
Billedrotation
For at rotere et billede med en vinkel θ, anvendes en rotationsmatrix:
For eksempel betyder rotation af et billede 90 grader med uret brugen af:
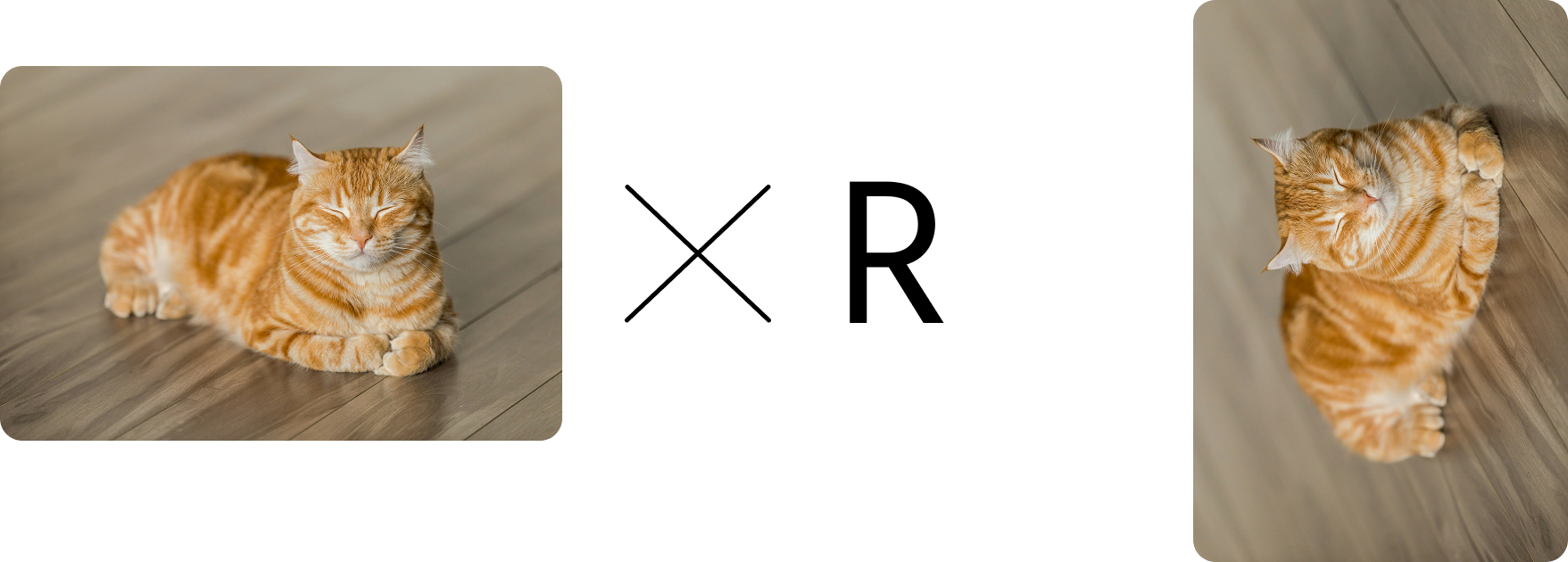
Anvendelse af denne transformation flytter hver pixel til en ny position, hvilket effektivt roterer billedet.
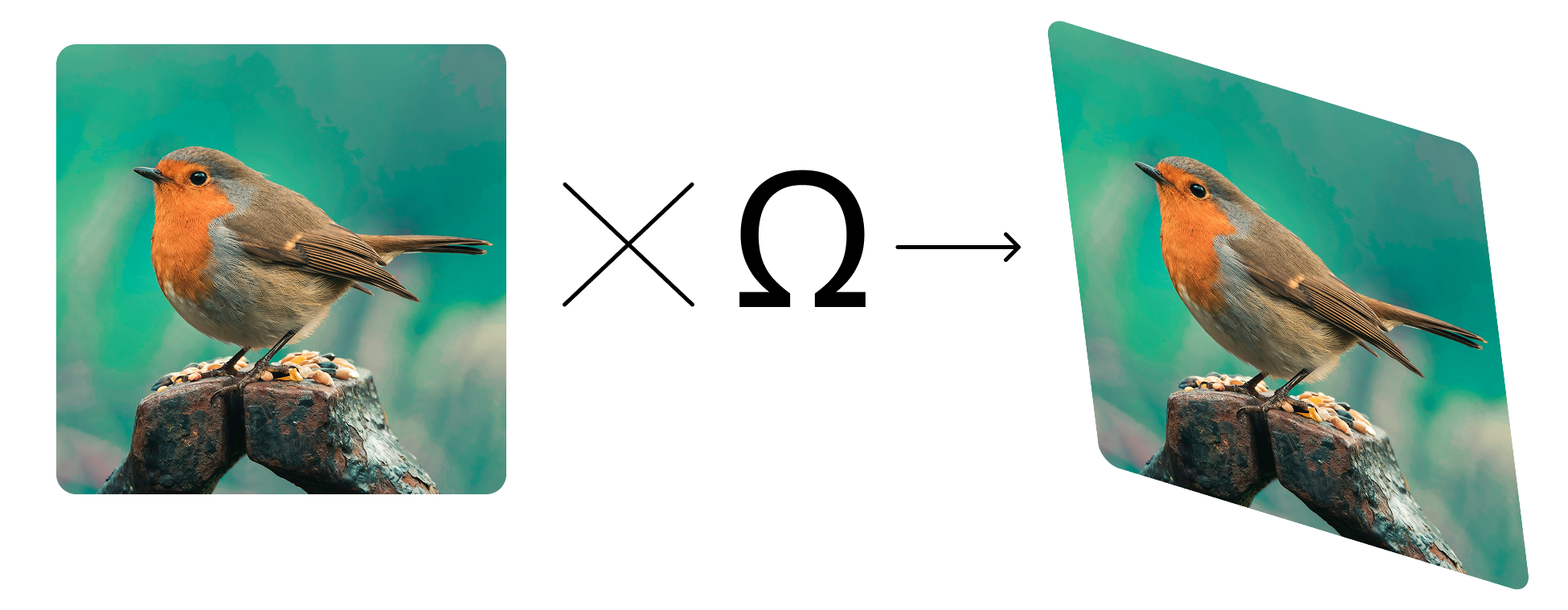
Forskydning (Skævvridning af et billede)
Forskydning forvrænger et billede ved at flytte dets rækker eller kolonner. Transformationsmatricen for forskydning er:
hvor ωx og ωy angiver, hvor meget billedet forskydes horisontalt og vertikalt. Forskydning af et billede 30% horisontalt og 20% vertikalt:
Hvorfor lineær algebra er vigtig i computer vision
Lineær algebra udgør grundlaget for mange billedbehandlingsopgaver, herunder:
- Objektgenkendelse (afgrænsningsbokse afhænger af transformationer);
- Ansigtsgenkendelse (egenværdier og PCA til feature-ekstraktion);
- Billedforbedring (filtrering anvender matrixkonvolutioner);
- Neurale netværk (vægte gemmes som matricer).
Ved at forstå disse grundlæggende operationer kan vi manipulere billeder effektivt og udvikle mere avancerede computer vision-applikationer.
Tak for dine kommentarer!
Spørg AI
Spørg AI

Spørg om hvad som helst eller prøv et af de foreslåede spørgsmål for at starte vores chat
Lineær Algebra til Billedmanipulation
Lineær algebra spiller en afgørende rolle i billedbehandling. Da digitale billeder repræsenteres som matricer af pixelværdier, kan matematiske operationer som transformationer, skalering og rotationer udføres ved hjælp af matrixmanipulationer. Lad os gennemgå de væsentlige lineære algebraiske begreber, der anvendes i computer vision.
Billedrepræsentation som matricer
Et digitalt billede er i bund og grund et gitter af pixels, og hver pixel har en intensitetsværdi. I gråtonebilleder er dette en 2D-matrix, hvor hver post svarer til et lysstyrkeniveau (0 for sort, 255 for hvid). For eksempel kan et simpelt 6×6 gråtonebillede se sådan ud:
Farvebilleder er derimod 3D-matricer (også kaldet tensorer), med separate lag for Rød, Grøn og Blå (RGB).
En tensor er en generel betegnelse for et multidimensionelt array af tal. Vektorer (1D) og matricer (2D) er særlige tilfælde af tensorer. Generelt kan tensorer have et vilkårligt antal dimensioner og fungerer som den grundlæggende struktur til at repræsentere data i mange computer vision- og maskinlæringsapplikationer.
Gråtonede billeder har en form på (60, 60), hvilket betyder, at de består af 60 rækker og 60 kolonner, hvor hver pixel repræsenterer en enkelt intensitetsværdi – der er kun én farvekanal. Til sammenligning har RGB-billeder en form på (60, 60, 3), hvilket angiver den samme rumlige opløsning (60 rækker og 60 kolonner), men med en ekstra dimension for farve: hver pixel indeholder tre værdier, der svarer til de røde, grønne og blå kanaler, som tilsammen definerer den fulde farve på det pågældende punkt.
Lineær algebra-transformationer til billedbehandling
Flere billedmanipulationer er baseret på matrixoperationer, hvilket gør lineær algebra til en central del af computer vision. Her gennemgås de mest anvendte transformationer.
Billedskalering (Ændring af størrelse)
Skalering øger eller mindsker størrelsen på et billede. Dette opnås ved at multiplicere billedmatricen med en skaleringsmatrix:
hvor sx og sy er skaleringsfaktorer for henholdsvis bredden og højden. Eksempel: Hvis vi vil fordoble størrelsen på et billede, bruger vi:
Multiplikation af denne matrix med hver pixels koordinater skalerer billedet op.
Billedrotation
For at rotere et billede med en vinkel θ, anvendes en rotationsmatrix:
For eksempel betyder rotation af et billede 90 grader med uret brugen af:
Anvendelse af denne transformation flytter hver pixel til en ny position, hvilket effektivt roterer billedet.
Forskydning (Skævvridning af et billede)
Forskydning forvrænger et billede ved at flytte dets rækker eller kolonner. Transformationsmatricen for forskydning er:
hvor ωx og ωy angiver, hvor meget billedet forskydes horisontalt og vertikalt. Forskydning af et billede 30% horisontalt og 20% vertikalt:
Hvorfor lineær algebra er vigtig i computer vision
Lineær algebra udgør grundlaget for mange billedbehandlingsopgaver, herunder:
- Objektgenkendelse (afgrænsningsbokse afhænger af transformationer);
- Ansigtsgenkendelse (egenværdier og PCA til feature-ekstraktion);
- Billedforbedring (filtrering anvender matrixkonvolutioner);
- Neurale netværk (vægte gemmes som matricer).
Ved at forstå disse grundlæggende operationer kan vi manipulere billeder effektivt og udvikle mere avancerede computer vision-applikationer.
Tak for dine kommentarer!
