Udfordring: Opbygning af et CNN
Stryg for at vise menuen
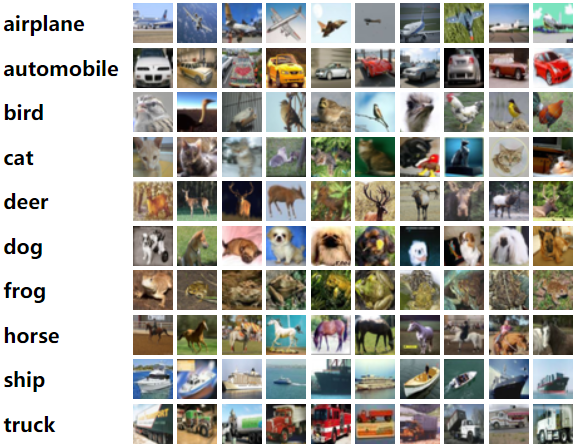
Convolutionelle neurale netværk (CNN'er) anvendes bredt til billedklassificering på grund af deres evne til at udtrække hierarkiske træk. I denne opgave skal du implementere og træne et VGG-lignende CNN ved hjælp af TensorFlow og Keras på CIFAR-10 datasættet. Datasættet består af 60.000 billeder (32×32×3), der tilhører 10 forskellige klasser, herunder fly, biler, fugle, katte og flere.
Dette projekt guider dig gennem indlæsning af datasættet, forbehandling af billederne, definition af CNN-modellen, træning af modellen og evaluering af dens ydeevne.
1. Dataforbehandling til CNN'er
Før træning af et CNN er forbehandling af data et afgørende trin for at sikre bedre ydeevne og hurtigere konvergens. Almindelige forbehandlingsmetoder omfatter:
-
Normalisering: denne metode indebærer skalering af billeders pixelværdier fra et interval mellem 0 og 255 til et interval mellem 0 og 1. Det implementeres ofte som
x_train / 255.0, x_test / 255.0; -
One-hot kodning: etiketter konverteres ofte til one-hot kodede vektorer til klassifikationsopgaver. Dette gøres typisk med funktionen
keras.utils.to_categorical, som omdanner heltals-etiketter (f.eks. 0, 1, 2, osv.) til en one-hot kodet vektor, såsom[1, 0, 0, 0]for et 4-klasses klassifikationsproblem.
2. Opbygning af CNN-arkitektur
En CNN-arkitektur består af flere lag, der udfører forskellige opgaver for at udtrække træk og lave forudsigelser. Du kan implementere vigtige CNN-lag ved at:
Konvolutionslag (Conv2D)
keras.layers.Conv2D(filters, kernel_size, activation='relu', padding='same', input_shape=(height, width, channels))
input_shape-parameteren skal kun angives i inputlaget.
Pooling-lag (MaxPooling2D)
keras.layers.MaxPooling2D(pool_size=(2, 2))
Fladgøringslag
keras.layers.Flatten()
Tæt lag
layers.Dense(units=512, activation='relu')
layers.Dense(10, activation='softmax')
Det sidste tætte lag har typisk et antal enheder svarende til antallet af klasser og anvender en softmax aktiveringsfunktion for at give en sandsynlighedsfordeling over klasserne.
3. Modelkompilering
Efter arkitekturen er defineret, skal modellen kompileres. Dette trin indebærer at specificere tab-funktionen, optimeringsalgoritmen og metrikker, som vil guide modellen under træningen. Følgende metoder anvendes ofte i CNN'er:
Optimeringsalgoritme (Adam)
Optimeringsalgoritmen justerer modellens vægte for at minimere tab-funktionen. Adam-optimeringsalgoritmen er populær på grund af dens effektivitet og evne til at tilpasse læringsraten under træningen.
keras.optimizers.Adam()
Tab-funktion (Categorical Crossentropy)
Til multi-klasse klassifikation anvendes typisk categorical crossentropy som tab-funktion. Dette kan implementeres som:
keras.losses.CategoricalCrossentropy()
Metrikker
Modelpræstation overvåges ved hjælp af metrikker til klassifikationsopgaver, såsom nøjagtighed, præcision, recall osv. Disse kan defineres som:
metrics = [
keras.metrics.Accuracy(),
keras.metrics.Precision(),
keras.metrics.Recall()
]
Kompilering
model.compile(optimizer='adam',
loss='categorical_crossentropy', # Or keras.losses.CategoricalCrossentropy()
metrics=metrics)
4. Træning af modellen
Træning af et CNN indebærer at give inputdata til netværket, beregne tabet og opdatere vægtene ved hjælp af backpropagation. Træningsprocessen styres af følgende nøglemetoder:
- Træning af modellen:
fit()-metoden bruges til at træne modellen. Denne metode tager træningsdata, antal epoker og batch-størrelse. Den inkluderer også en valgfri valideringssplit til at evaluere modellens ydeevne på usete data under træningen:
history = model.fit(x_train, y_train, epochs=10, batch_size=32, validation_split=0.2)
- Batch-størrelse og epoker: Batch-størrelsen bestemmer antallet af eksempler, der behandles, før modellens vægte opdateres, og antallet af epoker refererer til hvor mange gange hele datasættet føres igennem modellen.
5. Evaluering
Klassifikationsrapport
sklearn.metrics.classification_report() sammenligner sande og forudsagte værdier fra testdatasættet. Den indeholder præcision, recall og F1-score for hver klasse. Metoderne kræver kun klasselabels, så husk at konvertere tilbage fra vektorer ([0,0,1,0] -> 2):
y_pred = model.predict(x_test)
y_pred_classes = np.argmax(y_pred,axis = 1)
y_test_classes = np.argmax(y_test, axis = 1)
report = classification_report(y_test_classes, y_pred_classes, target_names=class_names)
print(report)
Evaluering
Når modellen er trænet, evalueres den på testdatasættet for at vurdere dens generaliseringsevne. Evalueringen giver metrics, som blev nævnt i .compile()-metoden. Evalueringen udføres med .evaluate():
results = model.evaluate(x_test, y_test, verbose=2, return_dict=True)
Forvirringsmatrix
For at få mere indsigt i modellens ydeevne kan vi visualisere forvirringsmatrixen, som viser de sande positive, falske positive, sande negative og falske negative forudsigelser for hver klasse. Forvirringsmatrixen kan beregnes med TensorFlow:
confusion_mtx = tf.math.confusion_matrix(y_test_classes, y_pred_classes)
Denne matrix kan derefter visualiseres ved hjælp af heatmaps for at observere, hvor godt modellen præsterer på hver klasse:
plt.figure(figsize=(12, 9))
c = sns.heatmap(confusion_mtx, annot=True, fmt='g')
c.set(xticklabels=class_names, yticklabels=class_names)
plt.show()
Opgave
1. Indlæs og forbehandl datasættet
- Importér CIFAR-10 datasættet fra Keras;
- Normalisér pixelværdierne til intervallet
[0,1]for bedre konvergens; - Konvertér klasselabels til
one-hot encodedformat til kategorisk klassifikation.
2. Definér CNN-modellen
Implementering af en VGG-lignende CNN-arkitektur med følgende nøglelag:

Konvolutionslag:
- Kernelstørrelse:
3×3; - Aktiveringsfunktion:
ReLU; - Padding:
'same'.
Poolinglag:
- Poolingtype:
max pooling; - Poolingstørrelse:
2×2.
Dropout-lag (Forebyg overfitting ved tilfældigt at deaktivere neuroner):
- Dropout-rate:
25%.
Flatten-lag – konverterer 2D feature maps til en 1D vektor til klassifikation.
Fuldforbundne lag – tætte lag til endelig klassifikation, med et relu- eller softmax-outputlag.
Kompilér modellen med:
Adam optimizer(for effektiv læring);Categorical cross-entropytab-funktion (til multi-klasse klassifikation);Accuracy metrictil at måle præstation (klasserne er balancerede, og du kan tilføje andre metrikker efter behov).
3. Træn modellen
- Angiv parametrene
epochsogbatch_sizefor træning (f.eks.epochs=20, batch_size=64); - Angiv parameteren
validation_splitfor at definere procentdelen af træningsdata, der bliver valideringsdata for at følge modellens præstation på usete billeder; - Gem træningshistorikken for at visualisere tendenser i nøjagtighed og tab.
4. Evaluer og visualisér resultater
- Test modellen på CIFAR-10 testdata og udskriv nøjagtigheden;
- Plot træningstab vs. valideringstab for at tjekke for overfitting;
- Plot træningsnøjagtighed vs. valideringsnøjagtighed for at sikre læringsprogression.
Tak for dine kommentarer!
Spørg AI
Spørg AI

Spørg om hvad som helst eller prøv et af de foreslåede spørgsmål for at starte vores chat
Udfordring: Opbygning af et CNN
Convolutionelle neurale netværk (CNN'er) anvendes bredt til billedklassificering på grund af deres evne til at udtrække hierarkiske træk. I denne opgave skal du implementere og træne et VGG-lignende CNN ved hjælp af TensorFlow og Keras på CIFAR-10 datasættet. Datasættet består af 60.000 billeder (32×32×3), der tilhører 10 forskellige klasser, herunder fly, biler, fugle, katte og flere.
Dette projekt guider dig gennem indlæsning af datasættet, forbehandling af billederne, definition af CNN-modellen, træning af modellen og evaluering af dens ydeevne.
1. Dataforbehandling til CNN'er
Før træning af et CNN er forbehandling af data et afgørende trin for at sikre bedre ydeevne og hurtigere konvergens. Almindelige forbehandlingsmetoder omfatter:
-
Normalisering: denne metode indebærer skalering af billeders pixelværdier fra et interval mellem 0 og 255 til et interval mellem 0 og 1. Det implementeres ofte som
x_train / 255.0, x_test / 255.0; -
One-hot kodning: etiketter konverteres ofte til one-hot kodede vektorer til klassifikationsopgaver. Dette gøres typisk med funktionen
keras.utils.to_categorical, som omdanner heltals-etiketter (f.eks. 0, 1, 2, osv.) til en one-hot kodet vektor, såsom[1, 0, 0, 0]for et 4-klasses klassifikationsproblem.
2. Opbygning af CNN-arkitektur
En CNN-arkitektur består af flere lag, der udfører forskellige opgaver for at udtrække træk og lave forudsigelser. Du kan implementere vigtige CNN-lag ved at:
Konvolutionslag (Conv2D)
keras.layers.Conv2D(filters, kernel_size, activation='relu', padding='same', input_shape=(height, width, channels))
input_shape-parameteren skal kun angives i inputlaget.
Pooling-lag (MaxPooling2D)
keras.layers.MaxPooling2D(pool_size=(2, 2))
Fladgøringslag
keras.layers.Flatten()
Tæt lag
layers.Dense(units=512, activation='relu')
layers.Dense(10, activation='softmax')
Det sidste tætte lag har typisk et antal enheder svarende til antallet af klasser og anvender en softmax aktiveringsfunktion for at give en sandsynlighedsfordeling over klasserne.
3. Modelkompilering
Efter arkitekturen er defineret, skal modellen kompileres. Dette trin indebærer at specificere tab-funktionen, optimeringsalgoritmen og metrikker, som vil guide modellen under træningen. Følgende metoder anvendes ofte i CNN'er:
Optimeringsalgoritme (Adam)
Optimeringsalgoritmen justerer modellens vægte for at minimere tab-funktionen. Adam-optimeringsalgoritmen er populær på grund af dens effektivitet og evne til at tilpasse læringsraten under træningen.
keras.optimizers.Adam()
Tab-funktion (Categorical Crossentropy)
Til multi-klasse klassifikation anvendes typisk categorical crossentropy som tab-funktion. Dette kan implementeres som:
keras.losses.CategoricalCrossentropy()
Metrikker
Modelpræstation overvåges ved hjælp af metrikker til klassifikationsopgaver, såsom nøjagtighed, præcision, recall osv. Disse kan defineres som:
metrics = [
keras.metrics.Accuracy(),
keras.metrics.Precision(),
keras.metrics.Recall()
]
Kompilering
model.compile(optimizer='adam',
loss='categorical_crossentropy', # Or keras.losses.CategoricalCrossentropy()
metrics=metrics)
4. Træning af modellen
Træning af et CNN indebærer at give inputdata til netværket, beregne tabet og opdatere vægtene ved hjælp af backpropagation. Træningsprocessen styres af følgende nøglemetoder:
- Træning af modellen:
fit()-metoden bruges til at træne modellen. Denne metode tager træningsdata, antal epoker og batch-størrelse. Den inkluderer også en valgfri valideringssplit til at evaluere modellens ydeevne på usete data under træningen:
history = model.fit(x_train, y_train, epochs=10, batch_size=32, validation_split=0.2)
- Batch-størrelse og epoker: Batch-størrelsen bestemmer antallet af eksempler, der behandles, før modellens vægte opdateres, og antallet af epoker refererer til hvor mange gange hele datasættet føres igennem modellen.
5. Evaluering
Klassifikationsrapport
sklearn.metrics.classification_report() sammenligner sande og forudsagte værdier fra testdatasættet. Den indeholder præcision, recall og F1-score for hver klasse. Metoderne kræver kun klasselabels, så husk at konvertere tilbage fra vektorer ([0,0,1,0] -> 2):
y_pred = model.predict(x_test)
y_pred_classes = np.argmax(y_pred,axis = 1)
y_test_classes = np.argmax(y_test, axis = 1)
report = classification_report(y_test_classes, y_pred_classes, target_names=class_names)
print(report)
Evaluering
Når modellen er trænet, evalueres den på testdatasættet for at vurdere dens generaliseringsevne. Evalueringen giver metrics, som blev nævnt i .compile()-metoden. Evalueringen udføres med .evaluate():
results = model.evaluate(x_test, y_test, verbose=2, return_dict=True)
Forvirringsmatrix
For at få mere indsigt i modellens ydeevne kan vi visualisere forvirringsmatrixen, som viser de sande positive, falske positive, sande negative og falske negative forudsigelser for hver klasse. Forvirringsmatrixen kan beregnes med TensorFlow:
confusion_mtx = tf.math.confusion_matrix(y_test_classes, y_pred_classes)
Denne matrix kan derefter visualiseres ved hjælp af heatmaps for at observere, hvor godt modellen præsterer på hver klasse:
plt.figure(figsize=(12, 9))
c = sns.heatmap(confusion_mtx, annot=True, fmt='g')
c.set(xticklabels=class_names, yticklabels=class_names)
plt.show()
Opgave
1. Indlæs og forbehandl datasættet
- Importér CIFAR-10 datasættet fra Keras;
- Normalisér pixelværdierne til intervallet
[0,1]for bedre konvergens; - Konvertér klasselabels til
one-hot encodedformat til kategorisk klassifikation.
2. Definér CNN-modellen
Implementering af en VGG-lignende CNN-arkitektur med følgende nøglelag:
Konvolutionslag:
- Kernelstørrelse:
3×3; - Aktiveringsfunktion:
ReLU; - Padding:
'same'.
Poolinglag:
- Poolingtype:
max pooling; - Poolingstørrelse:
2×2.
Dropout-lag (Forebyg overfitting ved tilfældigt at deaktivere neuroner):
- Dropout-rate:
25%.
Flatten-lag – konverterer 2D feature maps til en 1D vektor til klassifikation.
Fuldforbundne lag – tætte lag til endelig klassifikation, med et relu- eller softmax-outputlag.
Kompilér modellen med:
Adam optimizer(for effektiv læring);Categorical cross-entropytab-funktion (til multi-klasse klassifikation);Accuracy metrictil at måle præstation (klasserne er balancerede, og du kan tilføje andre metrikker efter behov).
3. Træn modellen
- Angiv parametrene
epochsogbatch_sizefor træning (f.eks.epochs=20, batch_size=64); - Angiv parameteren
validation_splitfor at definere procentdelen af træningsdata, der bliver valideringsdata for at følge modellens præstation på usete billeder; - Gem træningshistorikken for at visualisere tendenser i nøjagtighed og tab.
4. Evaluer og visualisér resultater
- Test modellen på CIFAR-10 testdata og udskriv nøjagtigheden;
- Plot træningstab vs. valideringstab for at tjekke for overfitting;
- Plot træningsnøjagtighed vs. valideringsnøjagtighed for at sikre læringsprogression.
Tak for dine kommentarer!
