Konvolutionslag
Stryg for at vise menuen
Forståelse af konvolutionslag
Konvolutionslag udgør kernen i convolutional neural networks (CNNs). De anvender konvolution, hvor en lille matrix kaldet et filter (eller kernel) bevæger sig hen over et billede for at registrere kanter, teksturer og former. Dette gør det muligt for CNNs at behandle billeder mere effektivt end traditionelle netværk.
I stedet for at analysere hele billedet på én gang, opdeler CNNs det i mindre sektioner og registrerer egenskaber på forskellige niveauer. Tidlige lag genkender simple mønstre som kanter, mens dybere lag identificerer komplekse strukturer.
Sådan fungerer konvolution
Konvolution involverer et filter (kernel), der bevæger sig hen over et billede og følger disse trin:
- Anvend kernel øverst til venstre på billedet.
- Udfør elementvis multiplikation mellem kernel og pixelværdier.
- Summér produkterne for at generere en outputpixel.
- Flyt kernel i henhold til stride og gentag.
- Generér et feature map, der fremhæver de registrerede mønstre.
Flere filtre hjælper CNN'er med at opfange forskellige træk, såsom lodrette kanter, kurver og teksturer.
Filtre (Kerne):
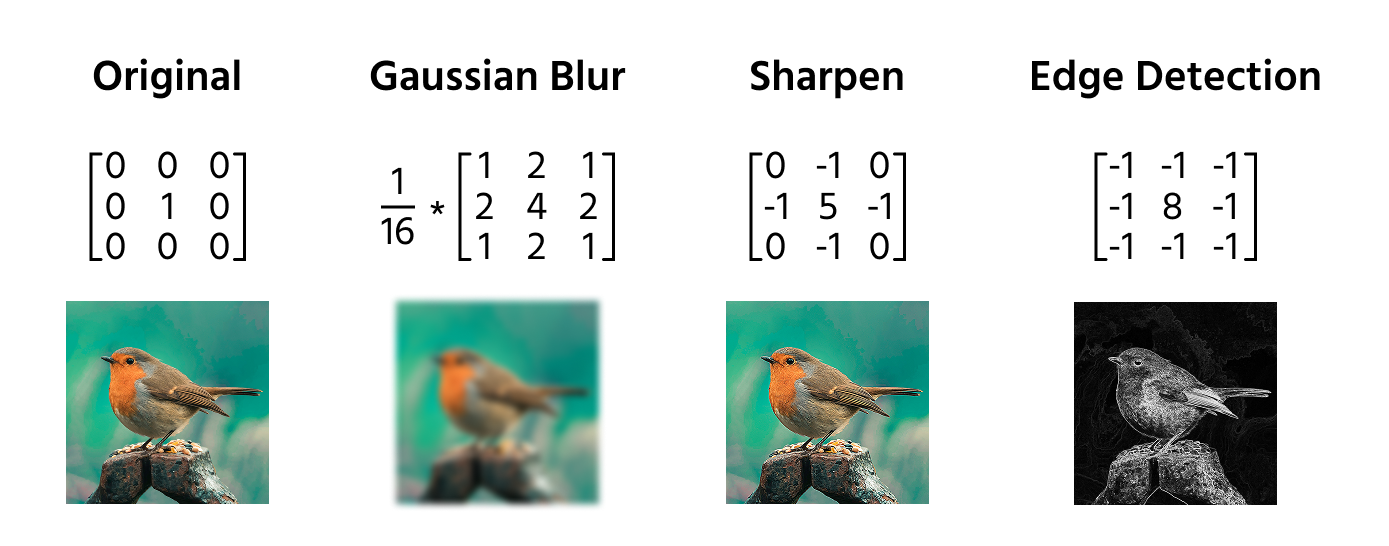
Filtre spiller en afgørende rolle i at udtrække meningsfulde mønstre fra billeder. Forskellige typer filtre specialiserer sig i at identificere forskellige træk:
-
Kantdetekteringsfiltre: identificerer objektgrænser ved at opdage pludselige intensitetsændringer (f.eks. Sobel, Prewitt og Laplacian filtre);
-
Teksturfiltre: opfanger gentagne mønstre såsom bølger eller gitter (f.eks. Gabor filtre);
-
Skarphedsfiltre: forstærker billeddetaljer ved at forstærke højfrekvente komponenter;
-
Sløringsfiltre: reducerer støj og udglatter billeder (f.eks. Gaussisk sløringsfilter);
-
Prægefiltre: fremhæver kanter og tilføjer en 3D-effekt ved at understrege dybde.
Hvert filter trænes til at genkende specifikke mønstre og bidrager til opbygningen af hierarkiske funktionsrepræsentationer i dybe CNN'er.
Convolution-lag genbruger samme filter på tværs af et billede, hvilket reducerer antallet af parametre og gør CNN'er effektive. Specialiserede lokalt forbundne lag anvender dog forskellige filtre til forskellige områder, når det er nødvendigt.
Ved at stable convolution-lag kan CNN'er udtrække detaljerede mønstre, hvilket gør dem effektive til billedklassificering, objektdetektion og vision-opgaver.
Hyperparametre:
- Stride: styrer hvor langt filteret bevæger sig pr. trin;
- Padding: tilføjer pixels for at kontrollere outputstørrelsen (samme padding bevarer størrelsen, valid padding reducerer den);
- Antal filtre (dybde): flere filtre forbedrer funktionsdetektionen, men øger beregningen.
Eksempel: For et 24×24 gråtonebillede med en 3×3 kerne og 64 filters er outputstørrelsen 22×22×64, beregnet som:
Hvor:
- W: bredde på inputbilledet = 24;
- H: højde på inputbilledet = 24;
- F: størrelse på filteret (kernen) = 3 (forudsat en kvadratisk 3×3 kerne);
- D: antal filtre (outputdybde) = 64.
Før næste kapitel
Selvom konvolutionslag kan formindske outputstørrelsen, er deres primære formål feature-ekstraktion, ikke dimensionalitetsreduktion. Pooling-lag derimod reducerer eksplicit dimensionaliteten samtidig med, at vigtige informationer bevares, hvilket sikrer effektivitet i dybere lag.
1. Hvad er den primære rolle for et konvolutionslag i et CNN?
2. Hvilken hyperparameter bestemmer, hvor langt et filter bevæger sig under konvolution?
3. Hvad er formålet med at anvende flere filtre i et konvolutionslag?
Tak for dine kommentarer!
Spørg AI
Spørg AI

Spørg om hvad som helst eller prøv et af de foreslåede spørgsmål for at starte vores chat
