Lineare Algebra für Bildmanipulation
Swipe um das Menü anzuzeigen
Lineare Algebra spielt eine entscheidende Rolle in der Bildverarbeitung. Da digitale Bilder als Matrizen von Pixelwerten dargestellt werden, können mathematische Operationen wie Transformationen, Skalierungen und Rotationen durch Matrixmanipulationen durchgeführt werden. Im Folgenden werden die grundlegenden Konzepte der linearen Algebra erläutert, die in der Computer Vision verwendet werden.
Bilddarstellung als Matrizen
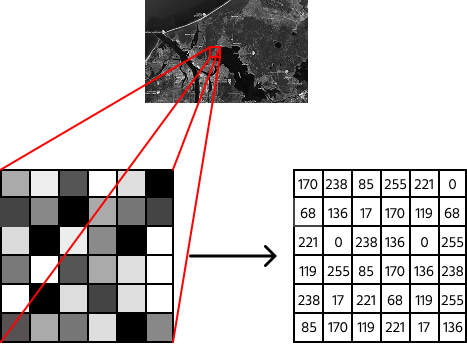
Ein digitales Bild ist im Wesentlichen ein Raster aus Pixeln, wobei jeder Pixel einen Intensitätswert besitzt. Bei Graustufenbildern handelt es sich um eine 2D-Matrix, wobei jeder Eintrag einem Helligkeitswert entspricht (0 für Schwarz, 255 für Weiß). Zum Beispiel könnte ein einfaches 6×6-Graustufenbild folgendermaßen aussehen:
Farbige Bilder hingegen sind 3D-Matrizen (auch Tensoren genannt), mit separaten Ebenen für Rot, Grün und Blau (RGB).
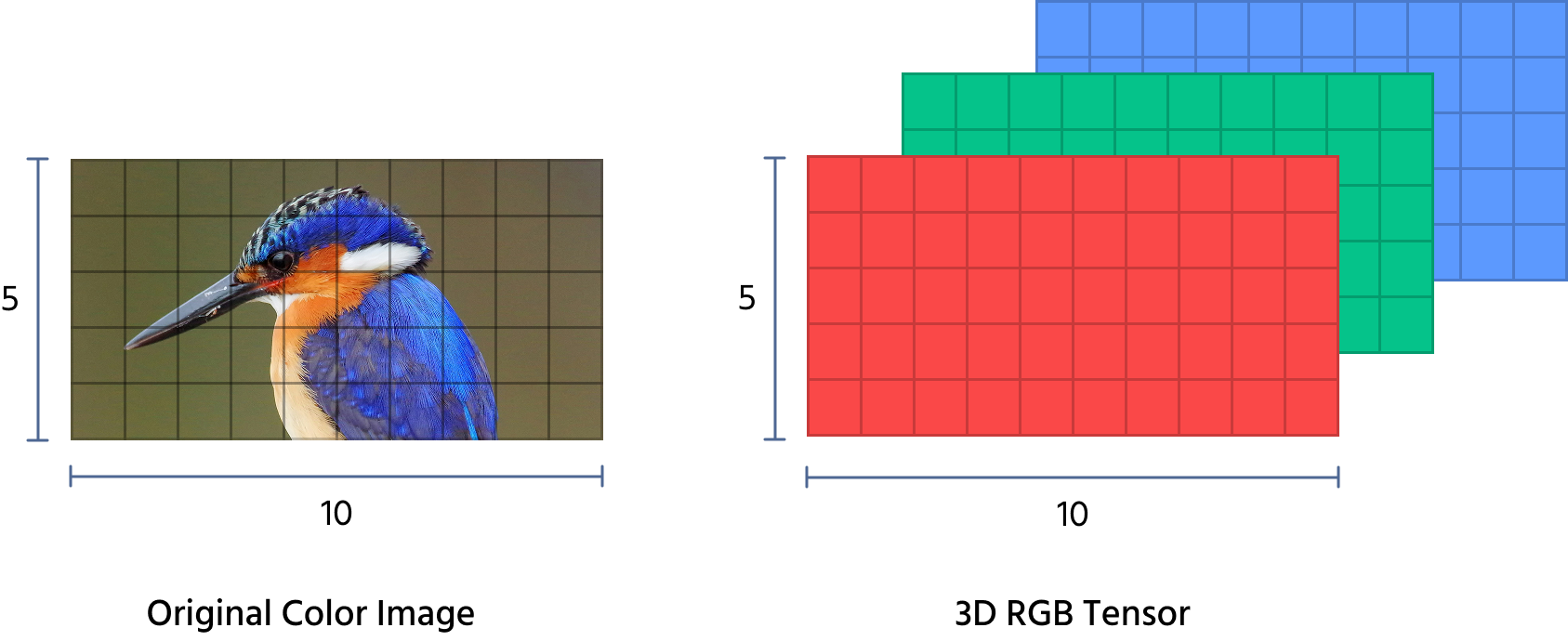
Ein Tensor ist ein allgemeiner Begriff für ein mehrdimensionales Zahlenarray. Vektoren (1D) und Matrizen (2D) sind Sonderfälle von Tensoren. Im Allgemeinen können Tensoren beliebig viele Dimensionen besitzen und dienen als grundlegende Struktur zur Darstellung von Daten in vielen Anwendungen der Computer Vision und des maschinellen Lernens.
Graustufenbilder haben die Form (60, 60), was bedeutet, dass sie aus 60 Zeilen und 60 Spalten bestehen, wobei jedes Pixel einen einzelnen Intensitätswert darstellt – es gibt nur einen Farbkanal. Im Gegensatz dazu haben RGB-Bilder die Form (60, 60, 3), was auf die gleiche räumliche Auflösung (60 Zeilen und 60 Spalten) hinweist, jedoch mit einer zusätzlichen Dimension für die Farbe: Jedes Pixel enthält drei Werte, die den roten, grünen und blauen Kanälen entsprechen und zusammen die vollständige Farbe an diesem Punkt definieren.
Lineare Algebra-Transformationen für die Bildverarbeitung
Mehrere Bildmanipulationen basieren auf Matrixoperationen, wodurch die lineare Algebra ein zentraler Bestandteil des Computer Visions ist. Im Folgenden werden die am häufigsten verwendeten Transformationen vorgestellt.
Bildskalierung (Größenänderung)
Die Skalierung vergrößert oder verkleinert die Größe eines Bildes. Dies wird erreicht, indem die Bildmatrix mit einer Skalierungsmatrix multipliziert wird:
wobei sx und sy die Skalierungsfaktoren für die Breite bzw. Höhe sind. Beispiel: Wenn die Bildgröße verdoppelt werden soll, verwenden wir:
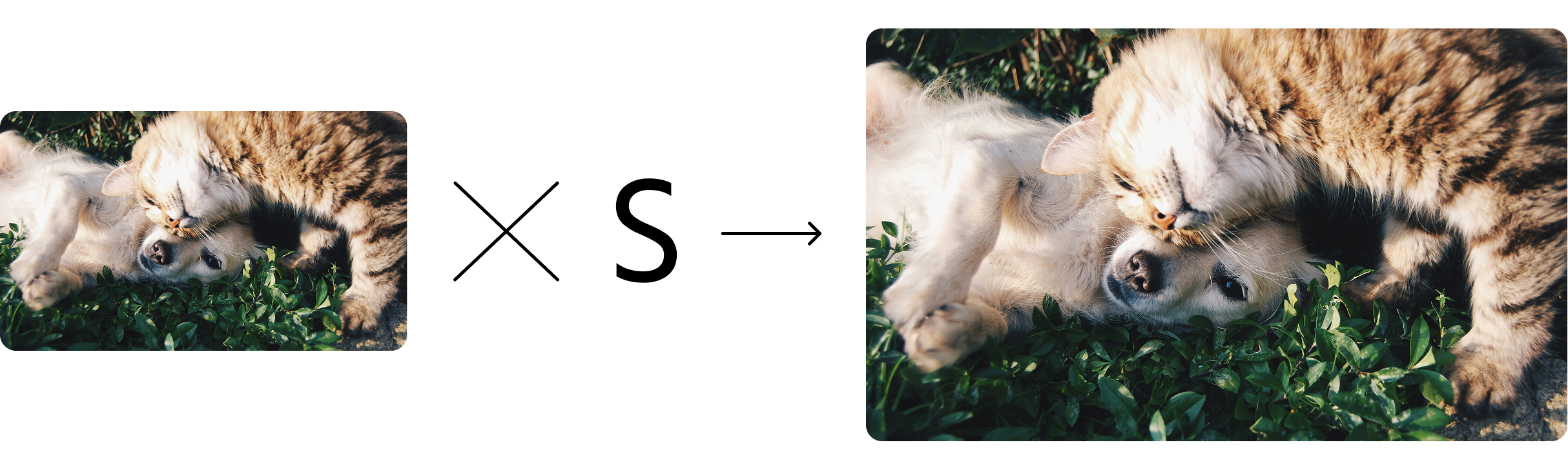
Die Multiplikation dieser Matrix mit den Koordinaten jedes Pixels vergrößert das Bild.
Bildrotation
Um ein Bild um einen Winkel θ zu drehen, wird eine Rotationsmatrix verwendet:
Zum Beispiel bedeutet das Drehen eines Bildes um 90 Grad im Uhrzeigersinn die Verwendung von:
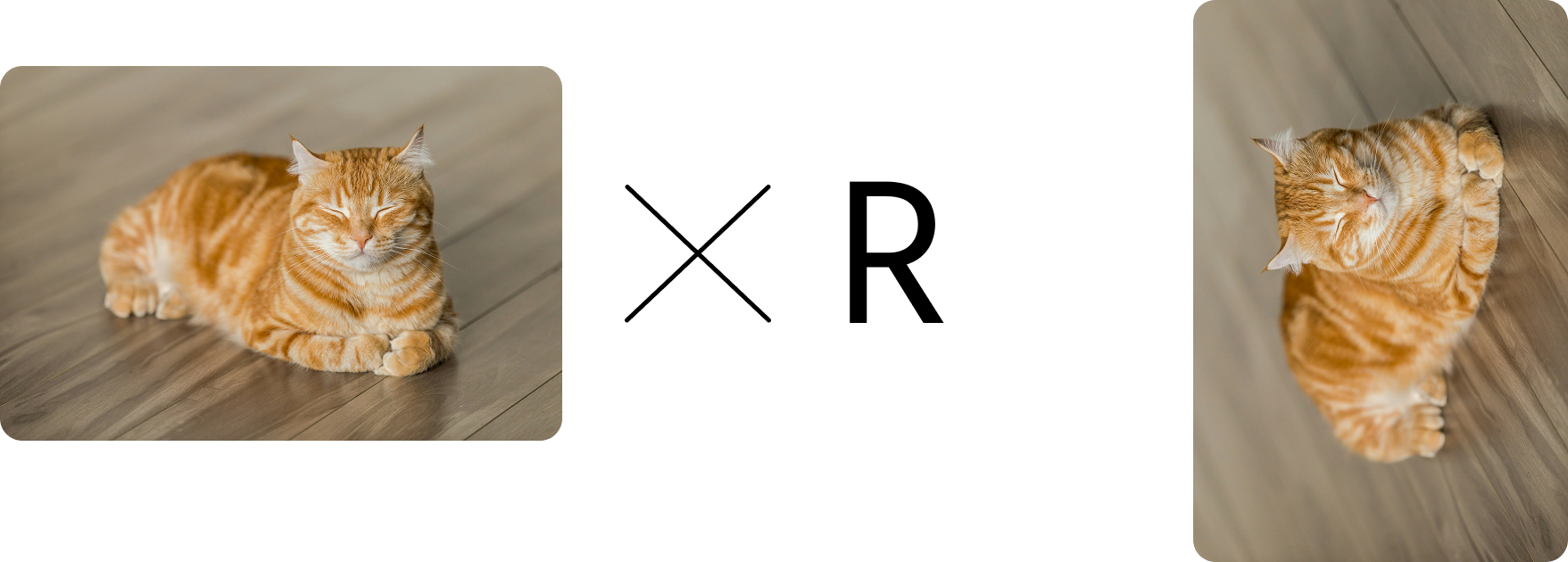
Durch Anwenden dieser Transformation wird jedes Pixel an eine neue Position verschoben, wodurch das Bild effektiv gedreht wird.
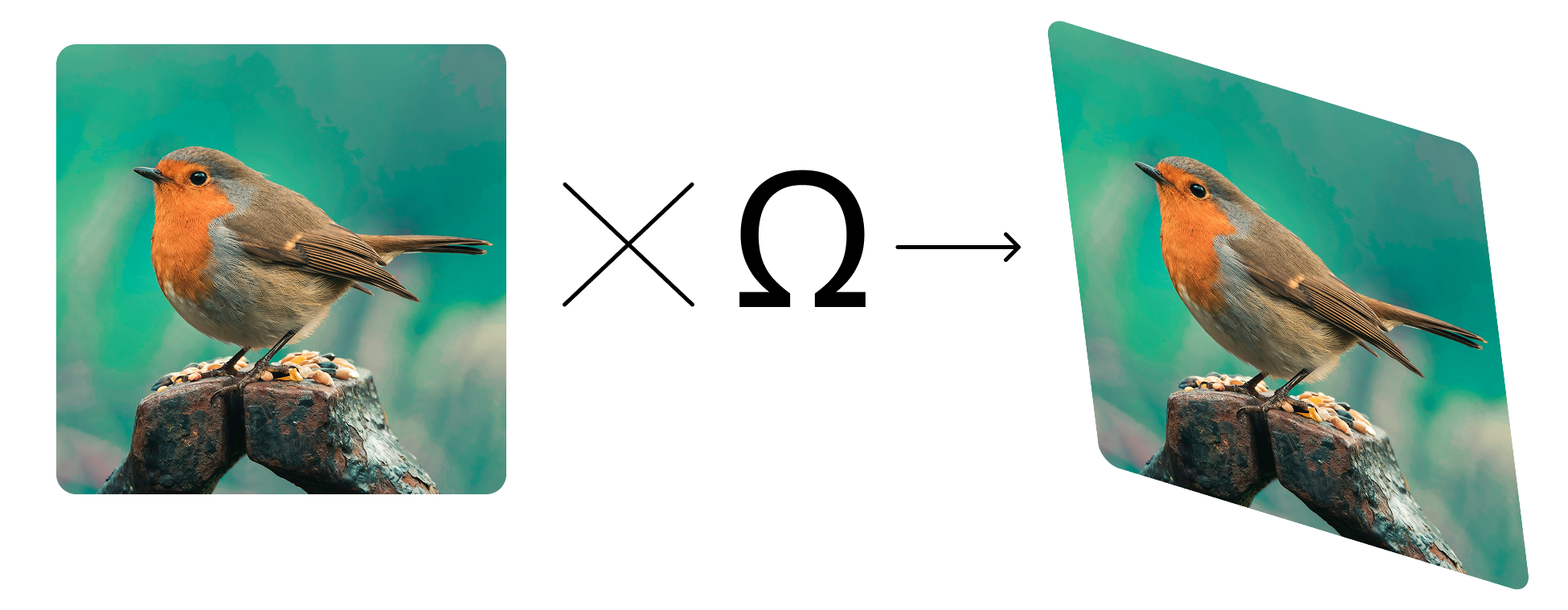
Scherung (Verzerrung eines Bildes)
Scherung verzerrt ein Bild, indem sie seine Zeilen oder Spalten verschiebt. Die Scherungsmatrix ist:
wobei ωx und ωy angeben, wie stark das Bild horizontal bzw. vertikal verzerrt wird. Verschiebung eines Bildes um 30 % horizontal und 20 % vertikal:
Warum lineare Algebra in der Computer Vision wichtig ist
Lineare Algebra bildet das Fundament vieler Bildverarbeitungsaufgaben, darunter:
- Objekterkennung (Begrenzungsrahmen basieren auf Transformationen);
- Gesichtserkennung (Eigenvektoren und PCA zur Merkmalsextraktion);
- Bildverbesserung (Filterung verwendet Matrixfaltungen);
- Neuronale Netze (Gewichte werden als Matrizen gespeichert).
Durch das Verständnis dieser grundlegenden Operationen können Bilder effektiv manipuliert und fortgeschrittene Anwendungen der Computer Vision entwickelt werden.
Danke für Ihr Feedback!
Fragen Sie AI
Fragen Sie AI

Fragen Sie alles oder probieren Sie eine der vorgeschlagenen Fragen, um unser Gespräch zu beginnen
Lineare Algebra für Bildmanipulation
Lineare Algebra spielt eine entscheidende Rolle in der Bildverarbeitung. Da digitale Bilder als Matrizen von Pixelwerten dargestellt werden, können mathematische Operationen wie Transformationen, Skalierungen und Rotationen durch Matrixmanipulationen durchgeführt werden. Im Folgenden werden die grundlegenden Konzepte der linearen Algebra erläutert, die in der Computer Vision verwendet werden.
Bilddarstellung als Matrizen
Ein digitales Bild ist im Wesentlichen ein Raster aus Pixeln, wobei jeder Pixel einen Intensitätswert besitzt. Bei Graustufenbildern handelt es sich um eine 2D-Matrix, wobei jeder Eintrag einem Helligkeitswert entspricht (0 für Schwarz, 255 für Weiß). Zum Beispiel könnte ein einfaches 6×6-Graustufenbild folgendermaßen aussehen:
Farbige Bilder hingegen sind 3D-Matrizen (auch Tensoren genannt), mit separaten Ebenen für Rot, Grün und Blau (RGB).
Ein Tensor ist ein allgemeiner Begriff für ein mehrdimensionales Zahlenarray. Vektoren (1D) und Matrizen (2D) sind Sonderfälle von Tensoren. Im Allgemeinen können Tensoren beliebig viele Dimensionen besitzen und dienen als grundlegende Struktur zur Darstellung von Daten in vielen Anwendungen der Computer Vision und des maschinellen Lernens.
Graustufenbilder haben die Form (60, 60), was bedeutet, dass sie aus 60 Zeilen und 60 Spalten bestehen, wobei jedes Pixel einen einzelnen Intensitätswert darstellt – es gibt nur einen Farbkanal. Im Gegensatz dazu haben RGB-Bilder die Form (60, 60, 3), was auf die gleiche räumliche Auflösung (60 Zeilen und 60 Spalten) hinweist, jedoch mit einer zusätzlichen Dimension für die Farbe: Jedes Pixel enthält drei Werte, die den roten, grünen und blauen Kanälen entsprechen und zusammen die vollständige Farbe an diesem Punkt definieren.
Lineare Algebra-Transformationen für die Bildverarbeitung
Mehrere Bildmanipulationen basieren auf Matrixoperationen, wodurch die lineare Algebra ein zentraler Bestandteil des Computer Visions ist. Im Folgenden werden die am häufigsten verwendeten Transformationen vorgestellt.
Bildskalierung (Größenänderung)
Die Skalierung vergrößert oder verkleinert die Größe eines Bildes. Dies wird erreicht, indem die Bildmatrix mit einer Skalierungsmatrix multipliziert wird:
wobei sx und sy die Skalierungsfaktoren für die Breite bzw. Höhe sind. Beispiel: Wenn die Bildgröße verdoppelt werden soll, verwenden wir:
Die Multiplikation dieser Matrix mit den Koordinaten jedes Pixels vergrößert das Bild.
Bildrotation
Um ein Bild um einen Winkel θ zu drehen, wird eine Rotationsmatrix verwendet:
Zum Beispiel bedeutet das Drehen eines Bildes um 90 Grad im Uhrzeigersinn die Verwendung von:
Durch Anwenden dieser Transformation wird jedes Pixel an eine neue Position verschoben, wodurch das Bild effektiv gedreht wird.
Scherung (Verzerrung eines Bildes)
Scherung verzerrt ein Bild, indem sie seine Zeilen oder Spalten verschiebt. Die Scherungsmatrix ist:
wobei ωx und ωy angeben, wie stark das Bild horizontal bzw. vertikal verzerrt wird. Verschiebung eines Bildes um 30 % horizontal und 20 % vertikal:
Warum lineare Algebra in der Computer Vision wichtig ist
Lineare Algebra bildet das Fundament vieler Bildverarbeitungsaufgaben, darunter:
- Objekterkennung (Begrenzungsrahmen basieren auf Transformationen);
- Gesichtserkennung (Eigenvektoren und PCA zur Merkmalsextraktion);
- Bildverbesserung (Filterung verwendet Matrixfaltungen);
- Neuronale Netze (Gewichte werden als Matrizen gespeichert).
Durch das Verständnis dieser grundlegenden Operationen können Bilder effektiv manipuliert und fortgeschrittene Anwendungen der Computer Vision entwickelt werden.
Danke für Ihr Feedback!
