Lineaarialgebra Kuvankäsittelyssä
Pyyhkäise näyttääksesi valikon
Lineaarialgebra on keskeisessä roolissa kuvankäsittelyssä. Koska digitaaliset kuvat esitetään matriiseina, joissa on pikseliarvoja, matemaattisia operaatioita kuten muunnoksia, skaalausta ja kiertoja voidaan suorittaa matriisimanipulaatioiden avulla. Tarkastellaan tietokonenäössä käytettyjä olennaisia lineaarialgebran käsitteitä.
Kuvan esittäminen matriiseina
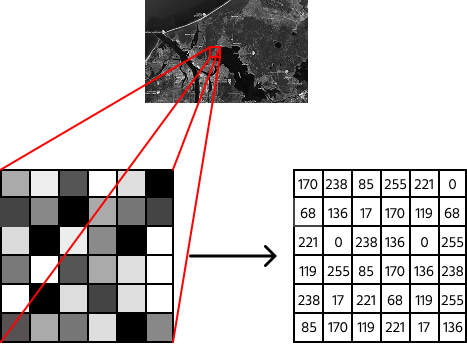
Digitaalinen kuva on pohjimmiltaan pikseliruudukko, jossa jokaisella pikselillä on intensiteettiarvo. Harmaasävykuvissa tämä on 2D-matriisi, jossa jokainen alkio vastaa kirkkaustasoa (0 tarkoittaa mustaa, 255 valkoista). Esimerkiksi yksinkertainen 6×6 harmaasävykuva voisi näyttää tältä:
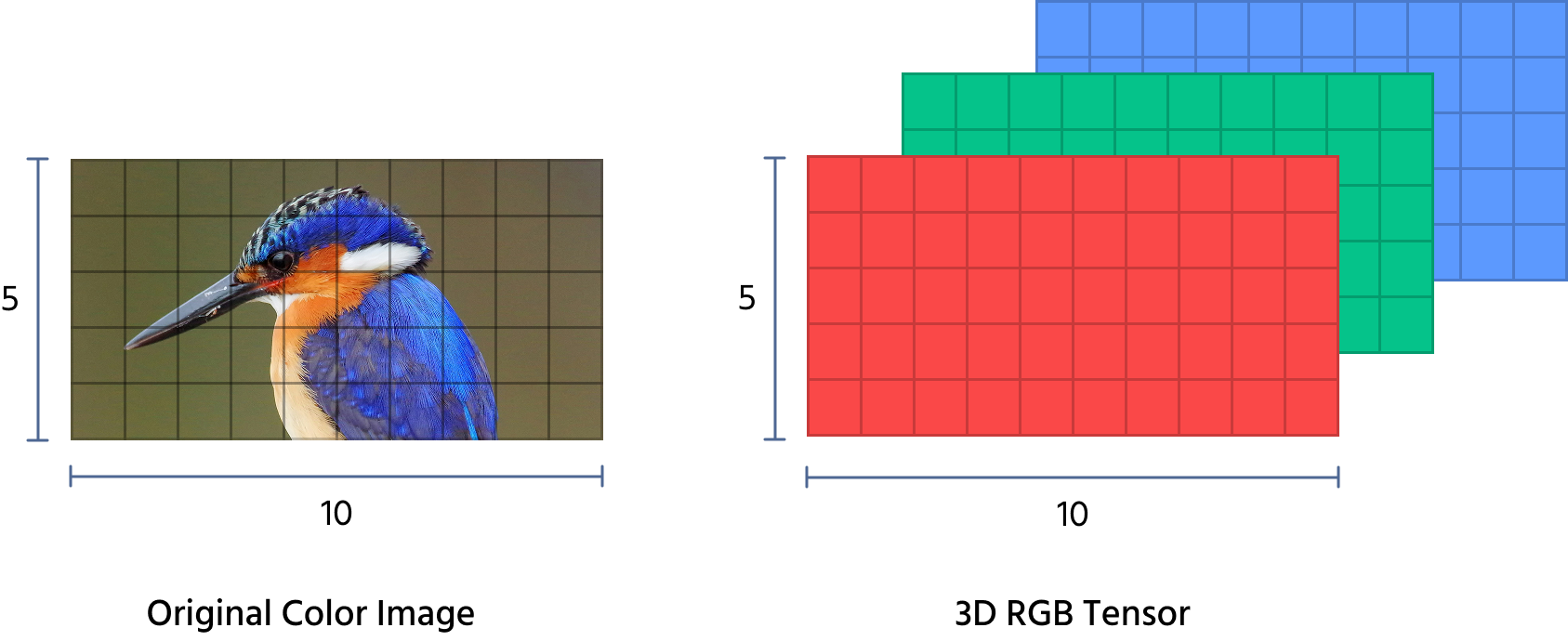
Värikuvat puolestaan ovat 3D-matriiseja (kutsutaan myös tensoriksi), joissa on erilliset kerrokset punaiselle, vihreälle ja siniselle (RGB).
Tensori on yleistermi moniulotteiselle lukutaulukolle. Vektorit (1D) ja matriisit (2D) ovat tensoreiden erikoistapauksia. Yleisesti ottaen tensoreilla voi olla mikä tahansa määrä ulottuvuuksia, ja ne toimivat perustana datan esittämiselle monissa tietokonenäön ja koneoppimisen sovelluksissa.
Harmaasävykuvien koko on (60, 60), mikä tarkoittaa, että niissä on 60 riviä ja 60 saraketta, ja jokainen pikseli edustaa yhtä intensiteettiarvoa – käytössä on vain yksi värikanava. Sen sijaan RGB-kuvien koko on (60, 60, 3), mikä osoittaa saman spatiaalisen resoluution (60 riviä ja 60 saraketta), mutta mukana on lisäulottuvuus väreille: jokainen pikseli sisältää kolme arvoa, jotka vastaavat punaisen, vihreän ja sinisen kanavia, ja yhdessä nämä määrittävät kyseisen kohdan täyden värin.
Lineaarialgebran muunnokset kuvankäsittelyssä
Useat kuvamanipulaatiot perustuvat matriisioperaatioihin, joten lineaarialgebra on keskeinen osa tietokonenäköä. Käydään läpi yleisimmät käytetyt muunnokset.
Kuvan skaalaus (koon muuttaminen)
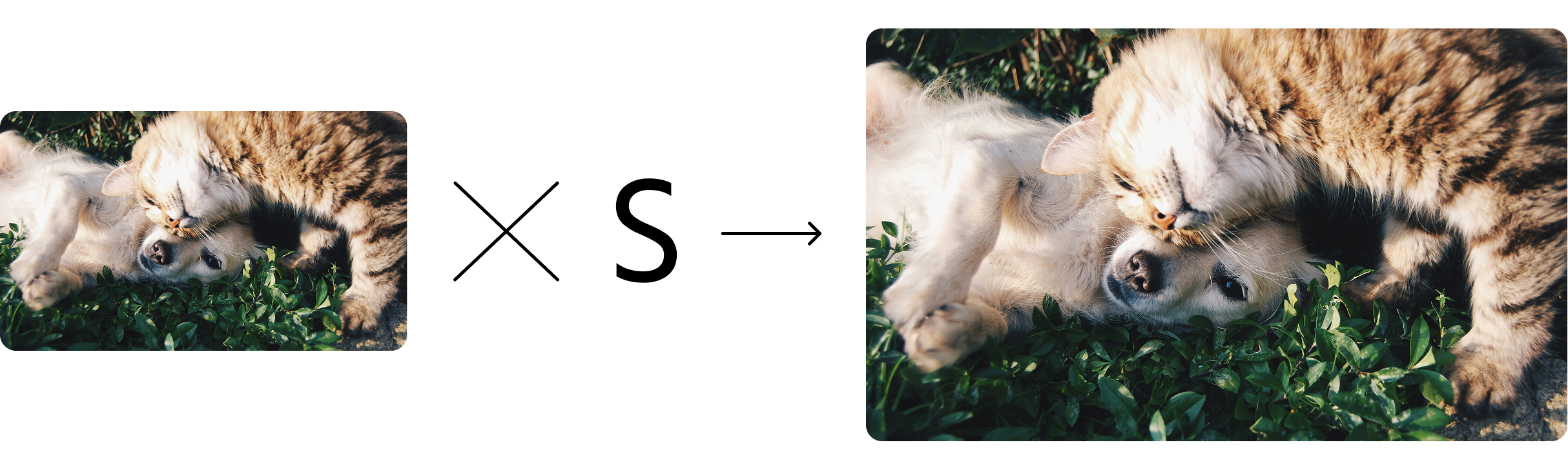
Skaalaus suurentaa tai pienentää kuvan kokoa. Tämä toteutetaan kertomalla kuvamatriisi skaalausmatriisilla:
missä sx ja sy ovat leveyden ja korkeuden skaalauskertoimet. Esimerkki: Jos haluamme kaksinkertaistaa kuvan koon, käytämme:
Kertomalla tämä matriisi jokaisen pikselin koordinaateilla kuva skaalataan suuremmaksi.
Kuvan kierto
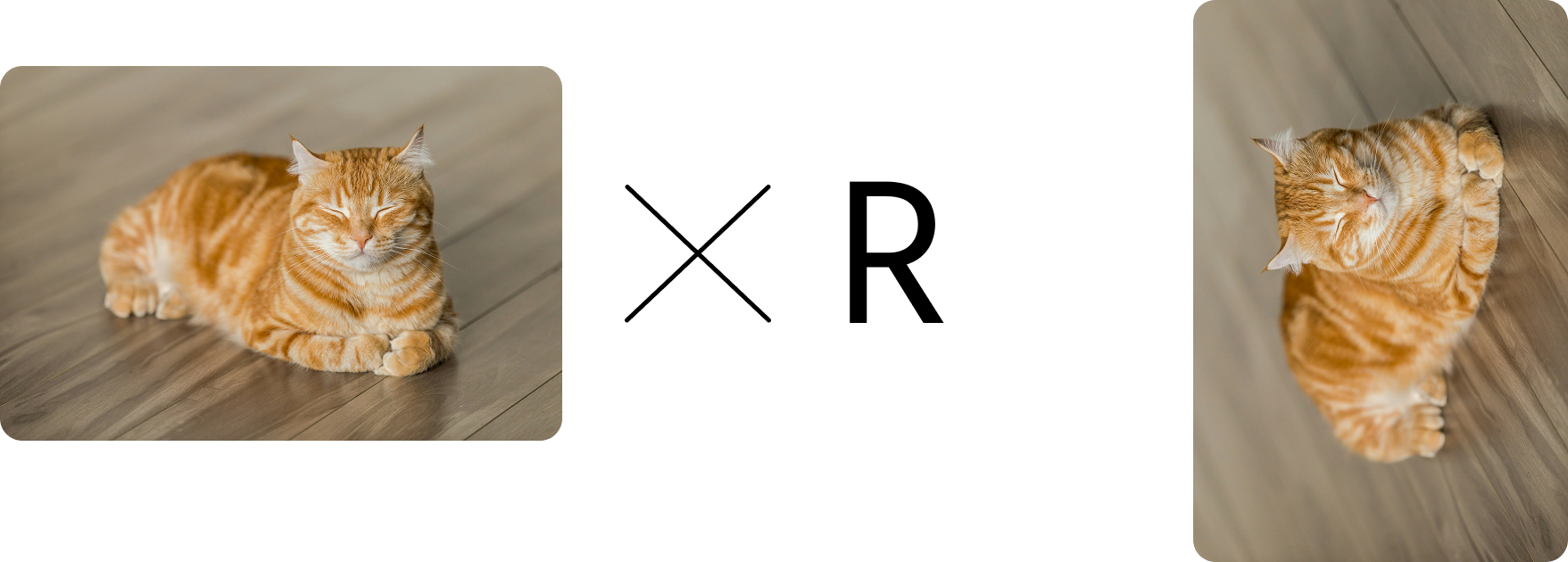
Kuvan kiertämiseksi kulmalla θ käytetään kiertomatriisia:
Esimerkiksi kuvan kiertäminen 90 astetta myötäpäivään tarkoittaa seuraavaa:
Tämän muunnoksen soveltaminen siirtää jokaisen pikselin uuteen sijaintiin, mikä käytännössä kiertää kuvaa.
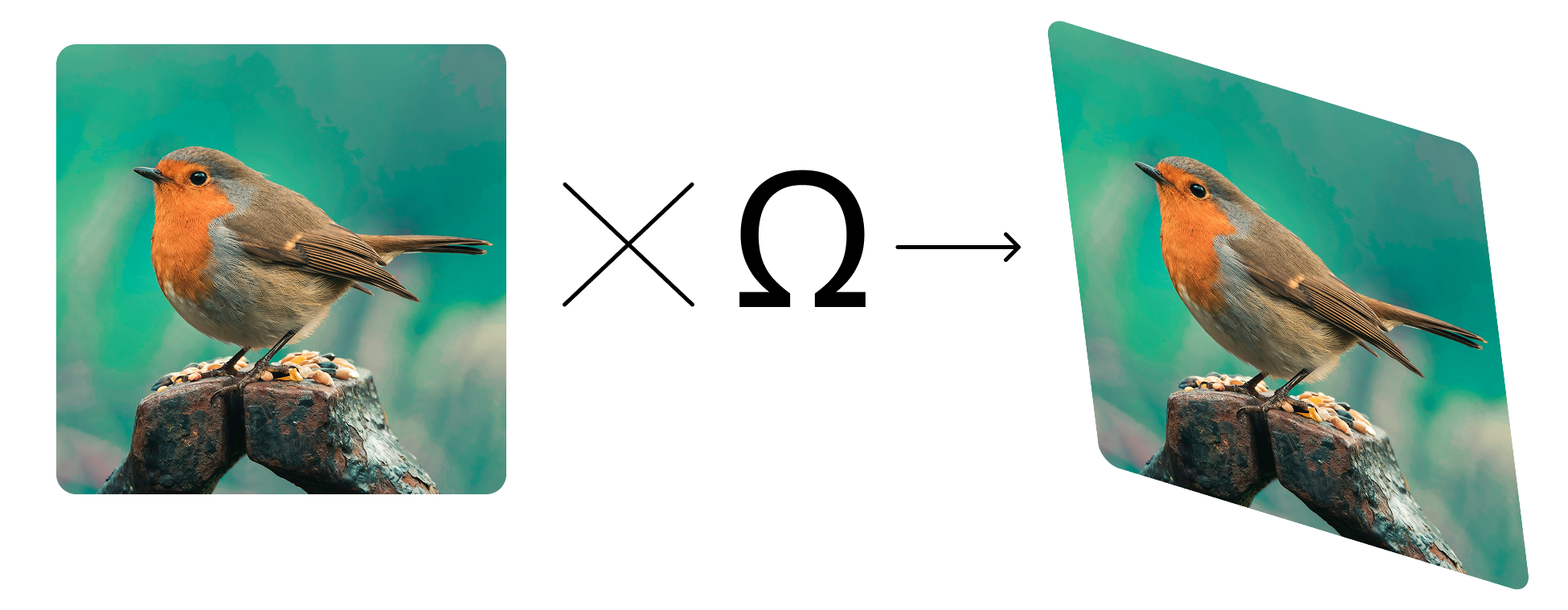
Leikkaus (Kuvan vinouttaminen)
Leikkaus vääristää kuvaa siirtämällä sen rivejä tai sarakkeita. Leikkausmuunnoksen matriisi on:
missä ωx ja ωy määrittävät, kuinka paljon kuvaa vinotetaan vaakasuunnassa ja pystysuunnassa. Kuvan siirtäminen 30 % vaakasuunnassa ja 20 % pystysuunnassa:
Miksi lineaarialgebra on tärkeää tietokonenäössä
Lineaarialgebra muodostaa perustan monille kuvankäsittelytehtäville, kuten:
- Objektien tunnistus (rajauslaatikot perustuvat muunnoksiin);
- Kasvojentunnistus (ominaisuuksien poiminta ominaisvektoreilla ja PCA:lla);
- Kuvanparannus (suodatus käyttää matriisikonvoluutioita);
- Neuroverkot (painot tallennetaan matriiseina).
Ymmärtämällä nämä perusoperaatiot voidaan käsitellä kuvia tehokkaasti ja rakentaa kehittyneempiä tietokonenäösovelluksia.
Kiitos palautteestasi!
Kysy tekoälyä
Kysy tekoälyä

Kysy mitä tahansa tai kokeile jotakin ehdotetuista kysymyksistä aloittaaksesi keskustelumme
Lineaarialgebra Kuvankäsittelyssä
Lineaarialgebra on keskeisessä roolissa kuvankäsittelyssä. Koska digitaaliset kuvat esitetään matriiseina, joissa on pikseliarvoja, matemaattisia operaatioita kuten muunnoksia, skaalausta ja kiertoja voidaan suorittaa matriisimanipulaatioiden avulla. Tarkastellaan tietokonenäössä käytettyjä olennaisia lineaarialgebran käsitteitä.
Kuvan esittäminen matriiseina
Digitaalinen kuva on pohjimmiltaan pikseliruudukko, jossa jokaisella pikselillä on intensiteettiarvo. Harmaasävykuvissa tämä on 2D-matriisi, jossa jokainen alkio vastaa kirkkaustasoa (0 tarkoittaa mustaa, 255 valkoista). Esimerkiksi yksinkertainen 6×6 harmaasävykuva voisi näyttää tältä:
Värikuvat puolestaan ovat 3D-matriiseja (kutsutaan myös tensoriksi), joissa on erilliset kerrokset punaiselle, vihreälle ja siniselle (RGB).
Tensori on yleistermi moniulotteiselle lukutaulukolle. Vektorit (1D) ja matriisit (2D) ovat tensoreiden erikoistapauksia. Yleisesti ottaen tensoreilla voi olla mikä tahansa määrä ulottuvuuksia, ja ne toimivat perustana datan esittämiselle monissa tietokonenäön ja koneoppimisen sovelluksissa.
Harmaasävykuvien koko on (60, 60), mikä tarkoittaa, että niissä on 60 riviä ja 60 saraketta, ja jokainen pikseli edustaa yhtä intensiteettiarvoa – käytössä on vain yksi värikanava. Sen sijaan RGB-kuvien koko on (60, 60, 3), mikä osoittaa saman spatiaalisen resoluution (60 riviä ja 60 saraketta), mutta mukana on lisäulottuvuus väreille: jokainen pikseli sisältää kolme arvoa, jotka vastaavat punaisen, vihreän ja sinisen kanavia, ja yhdessä nämä määrittävät kyseisen kohdan täyden värin.
Lineaarialgebran muunnokset kuvankäsittelyssä
Useat kuvamanipulaatiot perustuvat matriisioperaatioihin, joten lineaarialgebra on keskeinen osa tietokonenäköä. Käydään läpi yleisimmät käytetyt muunnokset.
Kuvan skaalaus (koon muuttaminen)
Skaalaus suurentaa tai pienentää kuvan kokoa. Tämä toteutetaan kertomalla kuvamatriisi skaalausmatriisilla:
missä sx ja sy ovat leveyden ja korkeuden skaalauskertoimet. Esimerkki: Jos haluamme kaksinkertaistaa kuvan koon, käytämme:
Kertomalla tämä matriisi jokaisen pikselin koordinaateilla kuva skaalataan suuremmaksi.
Kuvan kierto
Kuvan kiertämiseksi kulmalla θ käytetään kiertomatriisia:
Esimerkiksi kuvan kiertäminen 90 astetta myötäpäivään tarkoittaa seuraavaa:
Tämän muunnoksen soveltaminen siirtää jokaisen pikselin uuteen sijaintiin, mikä käytännössä kiertää kuvaa.
Leikkaus (Kuvan vinouttaminen)
Leikkaus vääristää kuvaa siirtämällä sen rivejä tai sarakkeita. Leikkausmuunnoksen matriisi on:
missä ωx ja ωy määrittävät, kuinka paljon kuvaa vinotetaan vaakasuunnassa ja pystysuunnassa. Kuvan siirtäminen 30 % vaakasuunnassa ja 20 % pystysuunnassa:
Miksi lineaarialgebra on tärkeää tietokonenäössä
Lineaarialgebra muodostaa perustan monille kuvankäsittelytehtäville, kuten:
- Objektien tunnistus (rajauslaatikot perustuvat muunnoksiin);
- Kasvojentunnistus (ominaisuuksien poiminta ominaisvektoreilla ja PCA:lla);
- Kuvanparannus (suodatus käyttää matriisikonvoluutioita);
- Neuroverkot (painot tallennetaan matriiseina).
Ymmärtämällä nämä perusoperaatiot voidaan käsitellä kuvia tehokkaasti ja rakentaa kehittyneempiä tietokonenäösovelluksia.
Kiitos palautteestasi!
