Osio 2. Luku 7
single
Reunojen Tunnistus
Pyyhkäise näyttääksesi valikon
Reunojen tunnistus
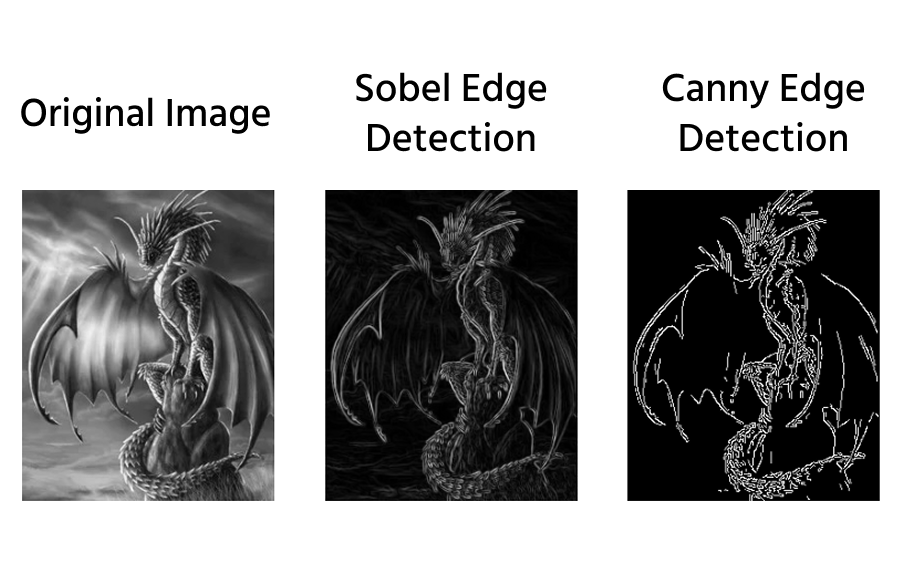
Reunat edustavat äkillisiä muutoksia pikselin intensiteetissä, jotka yleensä vastaavat objektien rajoja. Reunojen tunnistaminen auttaa muotojen tunnistuksessa ja segmentoinnissa.
Sobel-reunojen tunnistus
Sobel-operaattori laskee gradientit (intensiteetin muutokset) sekä X- että Y-suunnassa, mikä auttaa tunnistamaan vaaka- ja pystysuorat reunat.
# Convert to grayscale
image = cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)
# Apply Sobel filter
sobel_x = cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=5) # Detects vertical edges
sobel_y = cv2.Sobel(image, cv2.CV_64F, 0, 1, ksize=5) # Detects horizontal edges
sobel_combined = cv2.magnitude(sobel_x, sobel_y) # Combines both directions
Huom
Keskeiset parametrit:
src: syötekuva (oltava harmaasävykuva);ddepth: tuloskuvan bittisyvyys (esim.cv2.CV_64F);dx: derivaatan aste X-suunnassa (aseta1vaakareunoille);dy: derivaatan aste Y-suunnassa (aseta1pystyreunoille);ksize: ytimen koko (oltava pariton, esim.3,5,7).
Canny-reunojen tunnistus
Canny-reunantunnistin on monivaiheinen algoritmi, joka tuottaa tarkemmat reunat seuraavasti:
- Kohinan poisto Gaussin suodatuksella.
- Intensiteettigradienttien etsiminen Sobel-suodattimilla.
- Heikkojen reunojen vaimennus.
- Kaksoiskynnyksen ja reunojen jäljityksen käyttö.
# Apply Canny Edge Detector
canny_image = cv2.Canny(image, threshold1, threshold2, apertureSize, L2gradient)
Huomio
image: syöteharmaasävykuva;threshold1: reunanilmaisun alempi kynnysarvo (esim.50);threshold2: reunanilmaisun ylempi kynnysarvo (esim.150);apertureSize(valinnainen): Sobel-ytimen koko (oletus:3, oltava pariton);L2gradient(valinnainen): käytä tarkempaa L2-normin gradienttilaskentaa (oletus:False).
Reunanilmaisumenetelmien vertailu:
Tehtävä
Pyyhkäise aloittaaksesi koodauksen
Sinulle annetaan image:
- Muunna kuva harmaasävykuvaksi ja tallenna se muuttujaan
gray_image; - Käytä Sobel-suodatinta X- ja Y-suuntaan (tulosyvyys
cv2.CV_64Fja ytimen koko3) ja tallenna tuloksetsobel_xjasobel_y; - Yhdistä Sobel-suodatetut suunnat muuttujaan
sobel_img; - Käytä Canny-suodatinta kynnysarvoilla
200–300ja tallenna tulos muuttujaancanny_img.
Ratkaisu
Oliko kaikki selvää?
Kiitos palautteestasi!
Osio 2. Luku 7
single
Kysy tekoälyä
Kysy tekoälyä

Kysy mitä tahansa tai kokeile jotakin ehdotetuista kysymyksistä aloittaaksesi keskustelumme
