Ankkurilaatikot
Pyyhkäise näyttääksesi valikon
Anchor box on ennalta määritelty rajauslaatikko, jolla on kiinteä koko ja kuvasuhde, ja joka sijoitetaan tiettyihin kohtiin kuvan yli.
Miksi ankkurilaatikoita käytetään objektien tunnistuksessa
Ankkurilaatikot ovat keskeinen käsite nykyaikaisissa objektien tunnistusmalleissa, kuten Faster R-CNN ja YOLO. Ne toimivat ennalta määriteltyinä viitelaatikoina, jotka auttavat tunnistamaan erikokoisia ja -muotoisia objekteja, tehden tunnistuksesta nopeampaa ja luotettavampaa.
Sen sijaan, että objektit tunnistettaisiin alusta alkaen, mallit käyttävät ankkurilaatikoita lähtökohtina, joita säädetään paremmin havaittuihin objekteihin sopiviksi. Tämä lähestymistapa parantaa tehokkuutta ja tarkkuutta, erityisesti erikokoisten objektien tunnistuksessa.
Ero ankkurilaatikon ja rajauslaatikon välillä
- Ankkurilaatikko: ennalta määritelty malli, joka toimii viitteenä objektien tunnistuksessa;
- Rajauslaatikko: lopullinen ennustettu laatikko, joka on säädetty ankkurilaatikon pohjalta vastaamaan todellista objektia.

Toisin kuin rajaavat laatikot, joita säädetään dynaamisesti ennustuksen aikana, ankkurilaatikot ovat kiinteitä tietyissä kohdissa ennen objektin tunnistusta. Mallit oppivat tarkentamaan ankkurilaatikoita säätämällä niiden kokoa, sijaintia ja kuvasuhdetta, jolloin niistä muodostuu lopulliset rajaavat laatikot, jotka kuvaavat tunnistetut objektit tarkasti.
Kuinka verkko tuottaa ankkurilaatikoita
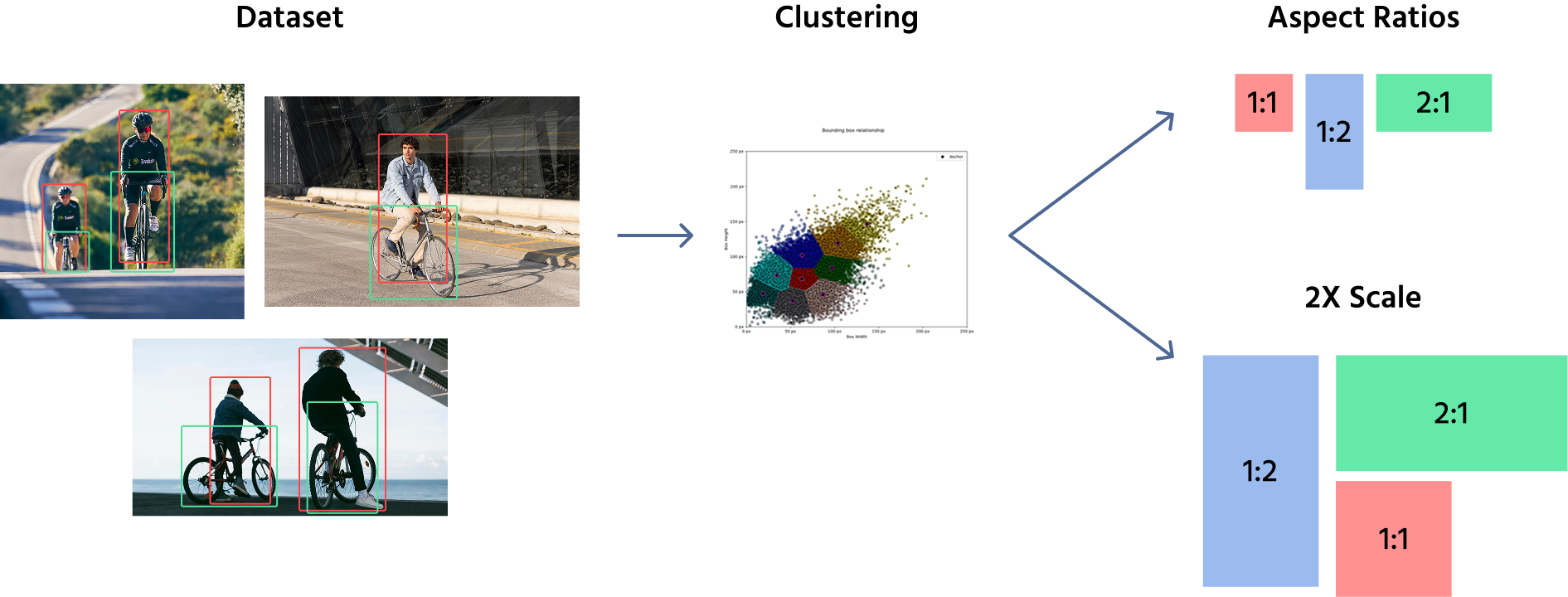
Ankkurilaatikoita ei sovelleta suoraan kuvaan, vaan kuvan ominaisuuskarttoihin. Ominaisuuksien poiston jälkeen joukko ankkurilaatikoita asetetaan näille ominaisuuskartoille vaihdellen koon ja kuvasuhteen mukaan. Ankkurilaatikoiden muotojen valinta on keskeistä ja vaatii tasapainoa pienten ja suurten objektien tunnistamisen välillä.
Ankkurilaatikoiden kokojen määrittelyssä käytetään yleensä manuaalista valintaa ja klusterointialgoritmeja, kuten K-Means, analysoimaan aineistoa ja määrittämään yleisimmät objektien muodot ja koot. Nämä ennalta määritetyt ankkurilaatikot sijoitetaan eri kohtiin ominaisuuskartoilla. Esimerkiksi objektintunnistusmalli voi käyttää ankkurilaatikoita, joiden koot ovat (16x16), (32x32), (64x64) ja kuvasuhteet 1:1, 1:2, and 2:1.
Kun ankkurilaatikot on määritelty, niitä sovelletaan piirrekartekoihin, ei alkuperäiseen kuvaan. Malli liittää useita ankkurilaatikoita jokaiseen piirrekartekon sijaintiin kattaen erilaisia muotoja ja kokoja. Koulutuksen aikana verkko säätää ankkurilaatikoita ennustamalla siirtymiä, tarkentaen niiden kokoa ja sijaintia, jotta ne sopivat paremmin kohteisiin.
Ankkurilaatikosta rajaavaan laatikkoon
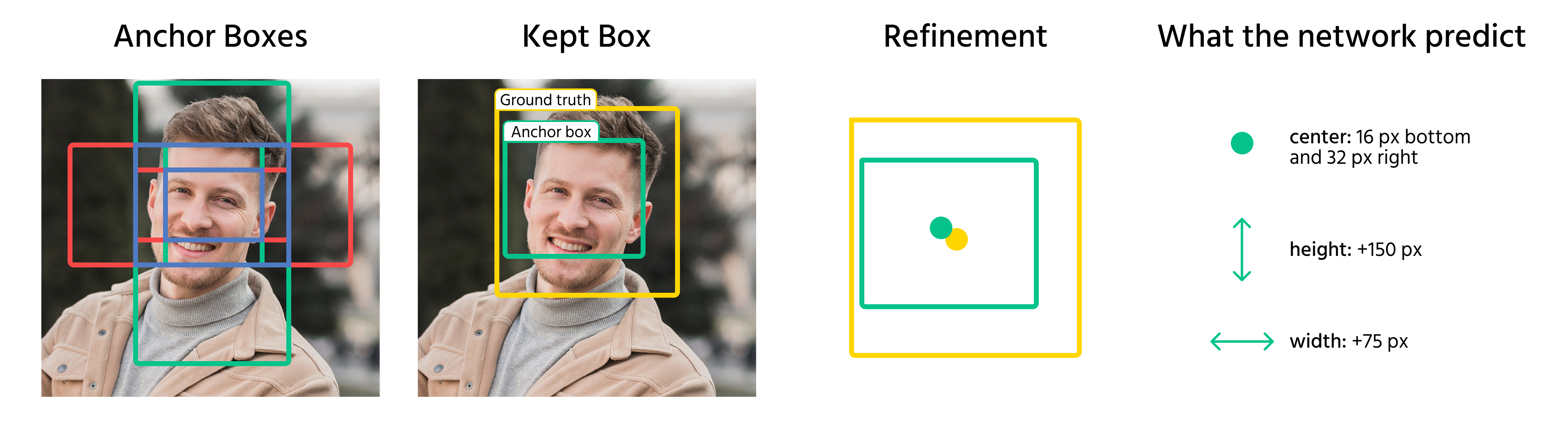
Kun ankkurilaatikot on liitetty kohteisiin, malli ennustaa siirtymiä niiden tarkentamiseksi. Nämä siirtymät sisältävät:
- Laatikon keskipisteen koordinaattien säätäminen;
- Leveyden ja korkeuden skaalaaminen;
- Laatikon siirtäminen paremmin kohteen kohdalle.
Näiden muunnosten avulla malli muuntaa ankkurilaatikot lopullisiksi rajaaviksi laatikoiksi, jotka vastaavat tarkasti kuvan kohteita.
Lähestymistavat ilman ankkureita tai niiden määrän vähentäminen
Vaikka ankkurilaatikoita käytetään laajasti, jotkin mallit pyrkivät vähentämään niiden käyttöä tai poistamaan ne kokonaan:
- Ankkurittomat menetelmät: mallit kuten
CenterNetjaFCOSennustavat kohteiden sijainnit suoraan ilman ennalta määriteltyjä ankkureita, mikä vähentää monimutkaisuutta; - Vähennetyt ankkurilähestymistavat:
EfficientDetjaYOLOv4optimoivat käytettyjen ankkurilaatikoiden määrän, tasapainottaen tunnistuksen nopeuden ja tarkkuuden.
Näiden lähestymistapojen tavoitteena on parantaa kohteentunnistuksen tehokkuutta säilyttäen korkea suorituskyky, erityisesti reaaliaikaisissa sovelluksissa.
Yhteenvetona ankkurilaatikot ovat olennainen osa kohteentunnistusta, auttaen malleja tunnistamaan kohteita tehokkaasti eri kokoisina ja eri kuvasuhteilla. Uudet kehitysaskeleet kuitenkin tutkivat tapoja vähentää tai poistaa ankkurilaatikot entistä nopeamman ja joustavamman tunnistuksen mahdollistamiseksi.
1. Mikä on ankkurilaatikoiden ensisijainen rooli objektin tunnistuksessa?
2. Miten ankkurilaatikot eroavat rajaavista laatikoista?
3. Mitä menetelmää käytetään yleisesti optimaalisten ankkurilaatikkokokojen määrittämiseen?
Kiitos palautteestasi!
Kysy tekoälyä
Kysy tekoälyä

Kysy mitä tahansa tai kokeile jotakin ehdotetuista kysymyksistä aloittaaksesi keskustelumme
Ankkurilaatikot
Anchor box on ennalta määritelty rajauslaatikko, jolla on kiinteä koko ja kuvasuhde, ja joka sijoitetaan tiettyihin kohtiin kuvan yli.
Miksi ankkurilaatikoita käytetään objektien tunnistuksessa
Ankkurilaatikot ovat keskeinen käsite nykyaikaisissa objektien tunnistusmalleissa, kuten Faster R-CNN ja YOLO. Ne toimivat ennalta määriteltyinä viitelaatikoina, jotka auttavat tunnistamaan erikokoisia ja -muotoisia objekteja, tehden tunnistuksesta nopeampaa ja luotettavampaa.
Sen sijaan, että objektit tunnistettaisiin alusta alkaen, mallit käyttävät ankkurilaatikoita lähtökohtina, joita säädetään paremmin havaittuihin objekteihin sopiviksi. Tämä lähestymistapa parantaa tehokkuutta ja tarkkuutta, erityisesti erikokoisten objektien tunnistuksessa.
Ero ankkurilaatikon ja rajauslaatikon välillä
- Ankkurilaatikko: ennalta määritelty malli, joka toimii viitteenä objektien tunnistuksessa;
- Rajauslaatikko: lopullinen ennustettu laatikko, joka on säädetty ankkurilaatikon pohjalta vastaamaan todellista objektia.
Toisin kuin rajaavat laatikot, joita säädetään dynaamisesti ennustuksen aikana, ankkurilaatikot ovat kiinteitä tietyissä kohdissa ennen objektin tunnistusta. Mallit oppivat tarkentamaan ankkurilaatikoita säätämällä niiden kokoa, sijaintia ja kuvasuhdetta, jolloin niistä muodostuu lopulliset rajaavat laatikot, jotka kuvaavat tunnistetut objektit tarkasti.
Kuinka verkko tuottaa ankkurilaatikoita
Ankkurilaatikoita ei sovelleta suoraan kuvaan, vaan kuvan ominaisuuskarttoihin. Ominaisuuksien poiston jälkeen joukko ankkurilaatikoita asetetaan näille ominaisuuskartoille vaihdellen koon ja kuvasuhteen mukaan. Ankkurilaatikoiden muotojen valinta on keskeistä ja vaatii tasapainoa pienten ja suurten objektien tunnistamisen välillä.
Ankkurilaatikoiden kokojen määrittelyssä käytetään yleensä manuaalista valintaa ja klusterointialgoritmeja, kuten K-Means, analysoimaan aineistoa ja määrittämään yleisimmät objektien muodot ja koot. Nämä ennalta määritetyt ankkurilaatikot sijoitetaan eri kohtiin ominaisuuskartoilla. Esimerkiksi objektintunnistusmalli voi käyttää ankkurilaatikoita, joiden koot ovat (16x16), (32x32), (64x64) ja kuvasuhteet 1:1, 1:2, and 2:1.
Kun ankkurilaatikot on määritelty, niitä sovelletaan piirrekartekoihin, ei alkuperäiseen kuvaan. Malli liittää useita ankkurilaatikoita jokaiseen piirrekartekon sijaintiin kattaen erilaisia muotoja ja kokoja. Koulutuksen aikana verkko säätää ankkurilaatikoita ennustamalla siirtymiä, tarkentaen niiden kokoa ja sijaintia, jotta ne sopivat paremmin kohteisiin.
Ankkurilaatikosta rajaavaan laatikkoon
Kun ankkurilaatikot on liitetty kohteisiin, malli ennustaa siirtymiä niiden tarkentamiseksi. Nämä siirtymät sisältävät:
- Laatikon keskipisteen koordinaattien säätäminen;
- Leveyden ja korkeuden skaalaaminen;
- Laatikon siirtäminen paremmin kohteen kohdalle.
Näiden muunnosten avulla malli muuntaa ankkurilaatikot lopullisiksi rajaaviksi laatikoiksi, jotka vastaavat tarkasti kuvan kohteita.
Lähestymistavat ilman ankkureita tai niiden määrän vähentäminen
Vaikka ankkurilaatikoita käytetään laajasti, jotkin mallit pyrkivät vähentämään niiden käyttöä tai poistamaan ne kokonaan:
- Ankkurittomat menetelmät: mallit kuten
CenterNetjaFCOSennustavat kohteiden sijainnit suoraan ilman ennalta määriteltyjä ankkureita, mikä vähentää monimutkaisuutta; - Vähennetyt ankkurilähestymistavat:
EfficientDetjaYOLOv4optimoivat käytettyjen ankkurilaatikoiden määrän, tasapainottaen tunnistuksen nopeuden ja tarkkuuden.
Näiden lähestymistapojen tavoitteena on parantaa kohteentunnistuksen tehokkuutta säilyttäen korkea suorituskyky, erityisesti reaaliaikaisissa sovelluksissa.
Yhteenvetona ankkurilaatikot ovat olennainen osa kohteentunnistusta, auttaen malleja tunnistamaan kohteita tehokkaasti eri kokoisina ja eri kuvasuhteilla. Uudet kehitysaskeleet kuitenkin tutkivat tapoja vähentää tai poistaa ankkurilaatikot entistä nopeamman ja joustavamman tunnistuksen mahdollistamiseksi.
Kiitos palautteestasi!
