Objektin Tunnistus
Pyyhkäise näyttääksesi valikon
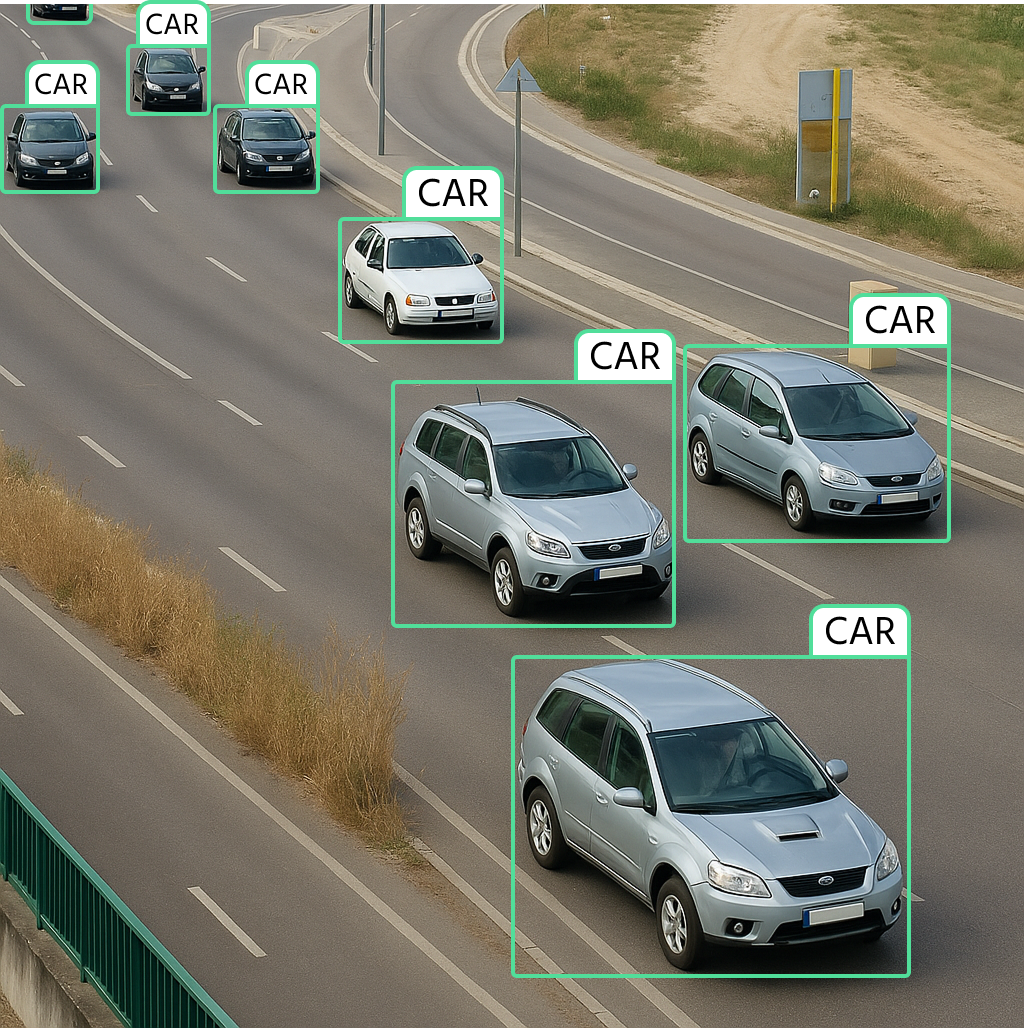
Objektin tunnistus on merkittävä edistysaskel kuvien luokittelun ja paikantamisen jälkeen. Kun luokittelu määrittää, mikä objekti kuvassa on, ja paikantaminen tunnistaa, missä yksittäinen objekti sijaitsee, objektin tunnistus laajentaa tätä tunnistamalla useita objekteja ja niiden sijainnit yhdessä kuvassa.
Mikä erottaa objektin tunnistuksen?
Toisin kuin luokittelu, joka antaa yhden luokan koko kuvalle, objektin tunnistus sisältää sekä luokittelun että paikantamisen useille objekteille. Tunnistusmallin täytyy ennustaa rajauslaatikot jokaisen objektin ympärille ja luokitella ne oikein. Tämä tekee objektin tunnistuksesta monimutkaisemman ja laskennallisesti vaativamman tehtävän kuin pelkkä luokittelu.
Liukuva ikkuna -menetelmä ja sen rajoitukset
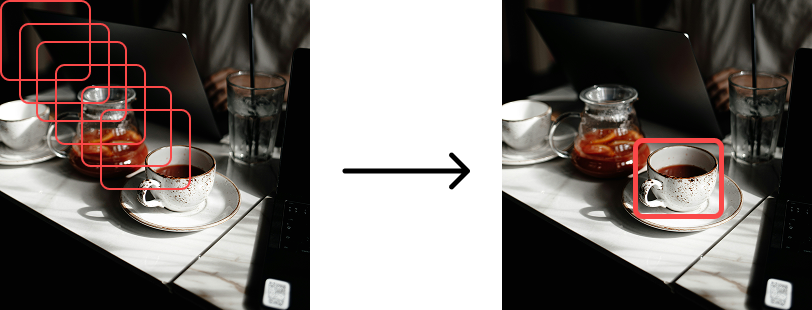
Perinteinen tapa objektien tunnistukseen on liukuva ikkuna -menetelmä, jossa kiinteän kokoinen ikkuna siirtyy kuvan yli ja luokittelee jokaisen osan. Vaikka menetelmä on käsitteellisesti yksinkertainen, siinä on useita rajoituksia:
- Laskennallisesti raskas: vaatii kuvan läpikäynnin useissa mittakaavoissa ja kohdissa, mikä johtaa suureen käsittelyaikaan;
- Jäykät ikkunakoot: objektit vaihtelevat kooltaan ja mittasuhteiltaan, mikä tekee kiinteän kokoisista ikkunoista tehottomia;
- Toistuvat laskennat: päällekkäiset ikkunat käsittelevät samoja kuvan alueita useaan kertaan, mikä tuhlaa resursseja.
Näiden tehottomuuksien vuoksi syväoppimiseen perustuvat objektintunnistusmenetelmät ovat suurelta osin korvanneet liukuvan ikkunan menetelmän.
Aluepohjaiset menetelmät: Selective Search & Region Proposal Networks (RPN)
Tehokkuuden parantamiseksi aluepohjaiset menetelmät ehdottavat kiinnostusalueita (RoI) koko kuvan läpikäynnin sijaan. Kaksi keskeistä tekniikkaa ovat:
-
Selective search: perinteinen menetelmä, joka ryhmittelee samankaltaisia pikseleitä alue-ehdotuksiksi ja vähentää rajaavien laatikoiden määrää. Vaikka se on tehokkaampi kuin liukuva ikkuna, se on silti hidas;
-
Region proposal networks (RPN): käytössä Faster R-CNN:ssä, RPN:t hyödyntävät neuroverkkoa mahdollisten objektialueiden tuottamiseen suoraan, mikä parantaa nopeutta ja tarkkuutta merkittävästi verrattuna selective search -menetelmään.
Varhaiset syväoppimiseen perustuvat lähestymistavat
Syväoppiminen mullisti objektien tunnistuksen tuomalla konvoluutiohermoverkot (CNN:t) tunnistusputkiin. Joitakin uraauurtavia malleja ovat:
-
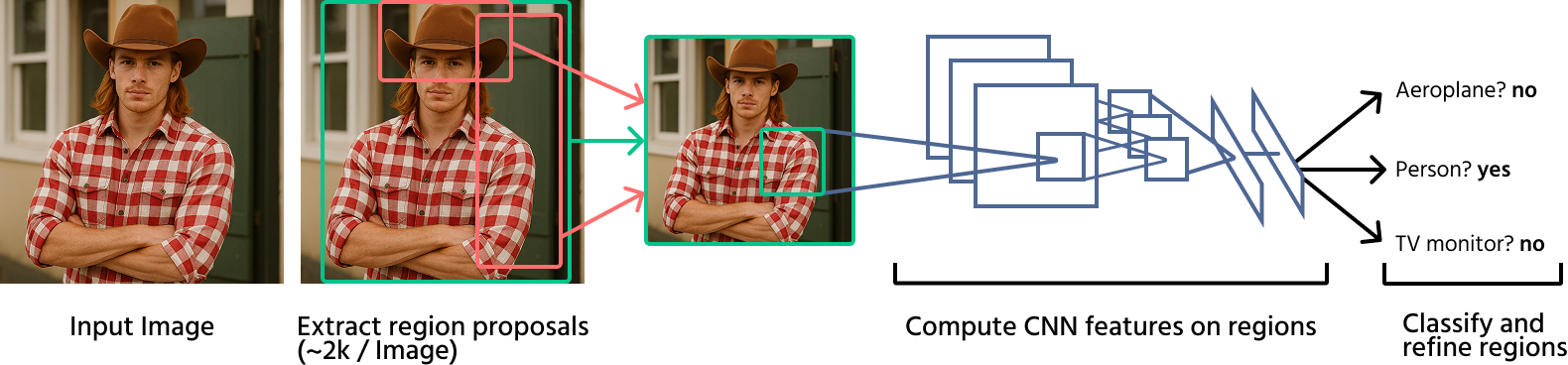
R-CNN (Regions with CNNs): tämä menetelmä käyttää CNN:ää jokaiseen alue-ehdotukseen, jotka on luotu selektiivisellä haulla. Vaikka se on huomattavasti tarkempi kuin perinteiset menetelmät, se on laskennallisesti hidas toistuvien CNN-arviointien vuoksi;
-
Fast R-CNN: parannus R-CNN:ään verrattuna, tämä malli käsittelee koko kuvan ensin CNN:llä ja käyttää sitten RoI-poolausta piirteiden erottamiseen luokittelua varten, mikä nopeuttaa tunnistusta;
-
Faster R-CNN: esittelee alue-ehdotusverkot (RPN:t) selektiivisen haun korvaamiseksi, tehden objektien tunnistuksesta nopeampaa ja tarkempaa integroimalla alue-ehdotusten generoinnin itse hermoverkkoon.
Objektien tunnistus rakentuu luokittelun ja paikannuksen pohjalle, mahdollistaen mallien tunnistaa useita objekteja yhdessä kuvassa. Perinteiset menetelmät, kuten liukuvat ikkunat, on korvattu tehokkaammilla aluepohjaisilla tekniikoilla, kuten R-CNN ja sen seuraajat. Faster R-CNN, joka hyödyntää alue-ehdotusverkkoja, edustaa merkittävää askelta kohti reaaliaikaista ja tarkkaa objektien tunnistusta. Edetessämme kehittyneemmät menetelmät, kuten YOLO ja SSD, parantavat edelleen tunnistuksen nopeutta ja tehokkuutta.
1. Mikä on Faster R-CNN:n tärkein etu verrattuna Fast R-CNN:ään?
2. Miksi liukuva ikkuna -menetelmä on tehoton objektintunnistuksessa?
3. Mikä seuraavista on syväoppimiseen perustuva objektintunnistusmenetelmä?
Kiitos palautteestasi!
Kysy tekoälyä
Kysy tekoälyä

Kysy mitä tahansa tai kokeile jotakin ehdotetuista kysymyksistä aloittaaksesi keskustelumme
