Couches de Convolution
Glissez pour afficher le menu
Comprendre les couches de convolution
Les couches de convolution constituent le cœur des réseaux de neurones convolutifs (CNN). Elles appliquent une convolution, où une petite matrice appelée filtre (ou noyau) glisse sur une image pour détecter les bords, textures et formes. Cela permet aux CNN de traiter les images plus efficacement que les réseaux traditionnels.
Au lieu d'analyser une image entière en une seule fois, les CNN la divisent en sections plus petites, détectant des caractéristiques à différents niveaux. Les premières couches reconnaissent des motifs simples comme les bords, tandis que les couches plus profondes détectent des structures complexes.
Fonctionnement de la convolution
La convolution implique le déplacement d’un filtre (noyau) sur une image, selon les étapes suivantes :
- Appliquer le noyau en haut à gauche de l’image.
- Effectuer une multiplication élément par élément entre le noyau et les valeurs des pixels.
- Additionner les produits pour générer un pixel de sortie.
- Déplacer le noyau selon le pas (stride) et répéter.
- Générer une carte de caractéristiques mettant en évidence les motifs détectés.
L'utilisation de multiples filtres permet aux CNN de capturer différentes caractéristiques, telles que les bords verticaux, les courbes et les textures.
Filtres (noyaux) :
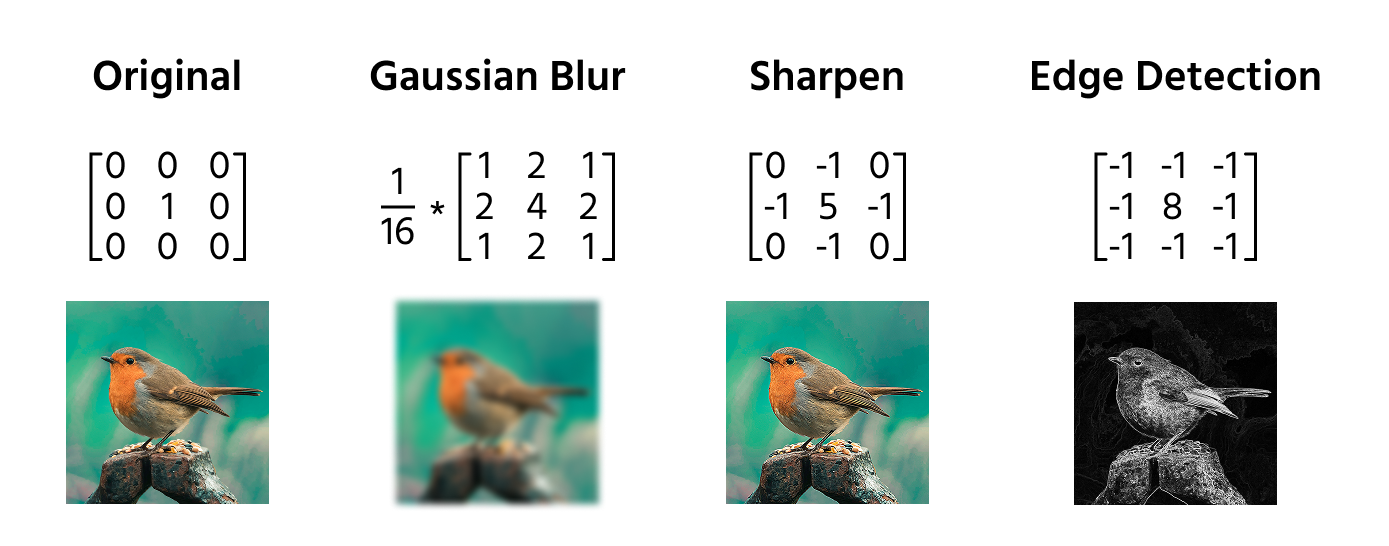
Les filtres jouent un rôle essentiel dans l'extraction de motifs significatifs à partir des images. Différents types de filtres sont spécialisés dans l'identification de diverses caractéristiques :
-
Filtres de détection de contours : identification des frontières des objets en détectant des changements brusques d'intensité (par exemple, filtres Sobel, Prewitt et Laplacien) ;
-
Filtres de texture : capture de motifs répétitifs tels que des vagues ou des grilles (par exemple, filtres de Gabor) ;
-
Filtres de renforcement : amélioration des détails de l'image en amplifiant les composantes haute fréquence ;
-
Filtres de flou : réduction du bruit et lissage des images (par exemple, filtre de flou gaussien) ;
-
Filtres d'embossage : mise en valeur des contours et ajout d'un effet 3D en accentuant la profondeur.
Chaque filtre est entraîné à détecter des motifs spécifiques et contribue à la construction de représentations hiérarchiques des caractéristiques dans les CNN profonds.
Les couches de convolution réutilisent le même filtre sur toute l'image, ce qui réduit le nombre de paramètres et rend les CNN efficaces. Cependant, des couches localement connectées spécialisées utilisent des filtres différents pour différentes régions lorsque cela est nécessaire.
En empilant les couches de convolution, les CNN extraient des motifs détaillés, ce qui les rend puissants pour la classification d'images, la détection d'objets et les tâches de vision par ordinateur.
Hyperparamètres :
- Stride : contrôle la distance parcourue par le filtre à chaque étape ;
- Padding : ajoute des pixels pour contrôler la taille de sortie (le padding "same" préserve la taille, le padding "valid" la réduit) ;
- Nombre de filtres (profondeur) : plus de filtres améliorent la détection des caractéristiques mais augmentent le calcul.
Exemple : Pour une image en niveaux de gris 24×24 utilisant un noyau 3×3 avec 64 filters, la taille de sortie est 22×22×64, calculée comme suit :
Où :
- W : largeur de l'image d'entrée = 24 ;
- H : hauteur de l'image d'entrée = 24 ;
- F : taille du filtre (noyau) = 3 (en supposant un noyau carré 3×3) ;
- D : nombre de filtres (profondeur de la sortie) = 64.
Avant le prochain chapitre
Bien que les couches convolutionnelles puissent réduire la taille de la sortie, leur objectif principal est l'extraction de caractéristiques, et non la réduction de la dimensionnalité. Les couches de pooling, en revanche, réduisent explicitement la dimensionnalité tout en conservant les informations importantes, assurant ainsi l'efficacité dans les couches plus profondes.
1. Quel est le rôle principal d'une couche convolutionnelle dans un CNN ?
2. Quel hyperparamètre détermine de combien un filtre se déplace lors de la convolution ?
3. Quel est le but d'appliquer plusieurs filtres dans une couche de convolution ?
Merci pour vos commentaires !
Demandez à l'IA
Demandez à l'IA

Posez n'importe quelle question ou essayez l'une des questions suggérées pour commencer notre discussion
Couches de Convolution
Comprendre les couches de convolution
Les couches de convolution constituent le cœur des réseaux de neurones convolutifs (CNN). Elles appliquent une convolution, où une petite matrice appelée filtre (ou noyau) glisse sur une image pour détecter les bords, textures et formes. Cela permet aux CNN de traiter les images plus efficacement que les réseaux traditionnels.
Au lieu d'analyser une image entière en une seule fois, les CNN la divisent en sections plus petites, détectant des caractéristiques à différents niveaux. Les premières couches reconnaissent des motifs simples comme les bords, tandis que les couches plus profondes détectent des structures complexes.
Fonctionnement de la convolution
La convolution implique le déplacement d’un filtre (noyau) sur une image, selon les étapes suivantes :
- Appliquer le noyau en haut à gauche de l’image.
- Effectuer une multiplication élément par élément entre le noyau et les valeurs des pixels.
- Additionner les produits pour générer un pixel de sortie.
- Déplacer le noyau selon le pas (stride) et répéter.
- Générer une carte de caractéristiques mettant en évidence les motifs détectés.
L'utilisation de multiples filtres permet aux CNN de capturer différentes caractéristiques, telles que les bords verticaux, les courbes et les textures.
Filtres (noyaux) :
Les filtres jouent un rôle essentiel dans l'extraction de motifs significatifs à partir des images. Différents types de filtres sont spécialisés dans l'identification de diverses caractéristiques :
-
Filtres de détection de contours : identification des frontières des objets en détectant des changements brusques d'intensité (par exemple, filtres Sobel, Prewitt et Laplacien) ;
-
Filtres de texture : capture de motifs répétitifs tels que des vagues ou des grilles (par exemple, filtres de Gabor) ;
-
Filtres de renforcement : amélioration des détails de l'image en amplifiant les composantes haute fréquence ;
-
Filtres de flou : réduction du bruit et lissage des images (par exemple, filtre de flou gaussien) ;
-
Filtres d'embossage : mise en valeur des contours et ajout d'un effet 3D en accentuant la profondeur.
Chaque filtre est entraîné à détecter des motifs spécifiques et contribue à la construction de représentations hiérarchiques des caractéristiques dans les CNN profonds.
Les couches de convolution réutilisent le même filtre sur toute l'image, ce qui réduit le nombre de paramètres et rend les CNN efficaces. Cependant, des couches localement connectées spécialisées utilisent des filtres différents pour différentes régions lorsque cela est nécessaire.
En empilant les couches de convolution, les CNN extraient des motifs détaillés, ce qui les rend puissants pour la classification d'images, la détection d'objets et les tâches de vision par ordinateur.
Hyperparamètres :
- Stride : contrôle la distance parcourue par le filtre à chaque étape ;
- Padding : ajoute des pixels pour contrôler la taille de sortie (le padding "same" préserve la taille, le padding "valid" la réduit) ;
- Nombre de filtres (profondeur) : plus de filtres améliorent la détection des caractéristiques mais augmentent le calcul.
Exemple : Pour une image en niveaux de gris 24×24 utilisant un noyau 3×3 avec 64 filters, la taille de sortie est 22×22×64, calculée comme suit :
Où :
- W : largeur de l'image d'entrée = 24 ;
- H : hauteur de l'image d'entrée = 24 ;
- F : taille du filtre (noyau) = 3 (en supposant un noyau carré 3×3) ;
- D : nombre de filtres (profondeur de la sortie) = 64.
Avant le prochain chapitre
Bien que les couches convolutionnelles puissent réduire la taille de la sortie, leur objectif principal est l'extraction de caractéristiques, et non la réduction de la dimensionnalité. Les couches de pooling, en revanche, réduisent explicitement la dimensionnalité tout en conservant les informations importantes, assurant ainsi l'efficacité dans les couches plus profondes.
Merci pour vos commentaires !
