Algebra Lineare per la Manipolazione delle Immagini
Scorri per mostrare il menu
L'algebra lineare svolge un ruolo fondamentale nell'elaborazione delle immagini. Poiché le immagini digitali sono rappresentate come matrici di valori di pixel, operazioni matematiche come trasformazioni, ridimensionamenti e rotazioni possono essere eseguite tramite manipolazioni matriciali. Analizziamo i concetti essenziali di algebra lineare utilizzati nella computer vision.
Rappresentazione delle immagini come matrici
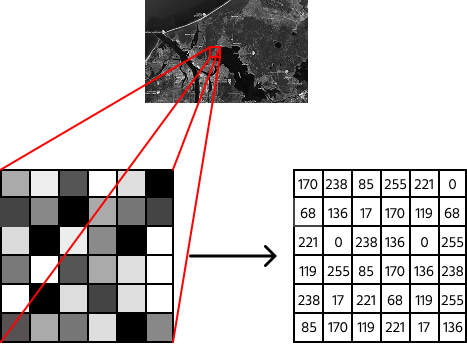
Un'immagine digitale è essenzialmente una griglia di pixel e ogni pixel ha un valore di intensità. Nelle immagini in scala di grigi, questa è una matrice 2D, dove ogni elemento corrisponde a un livello di luminosità (0 per il nero, 255 per il bianco). Ad esempio, una semplice immagine in scala di grigi 6×6 potrebbe apparire così:
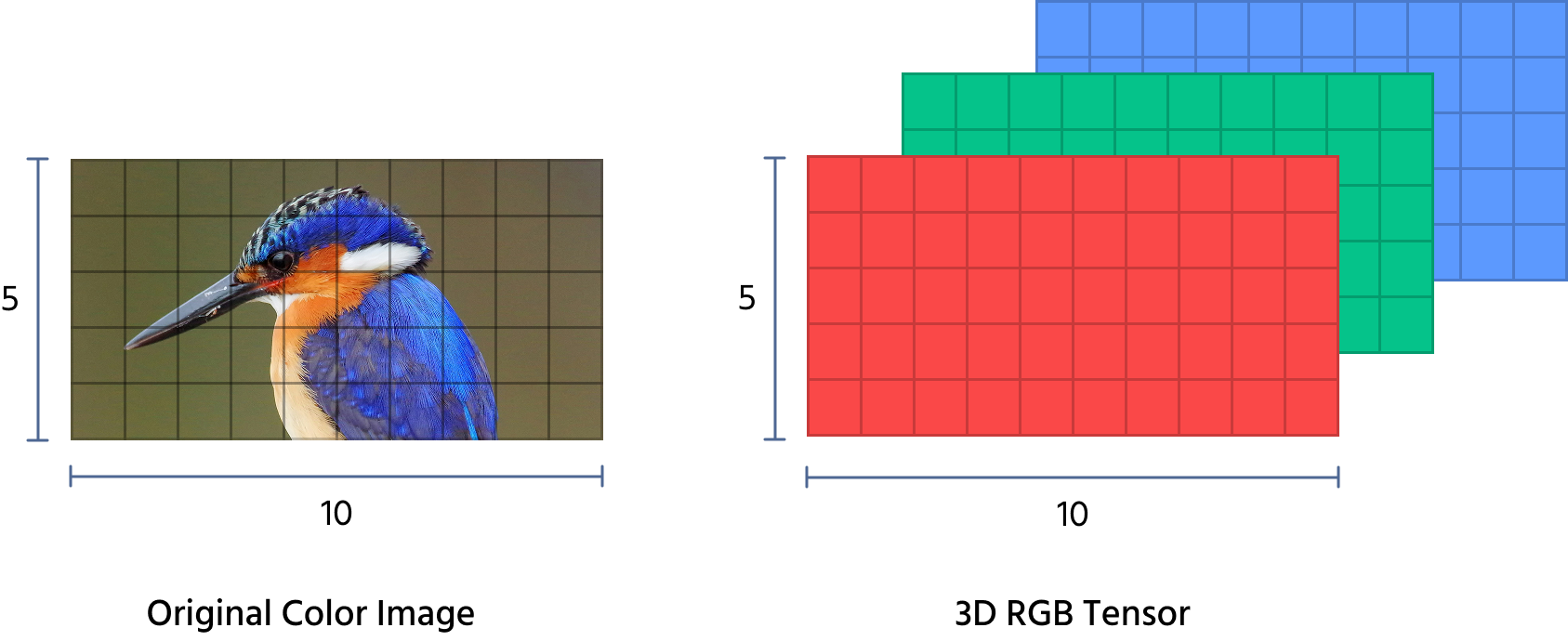
Le immagini a colori, invece, sono matrici 3D (dette anche tensori), con livelli separati per Rosso, Verde e Blu (RGB).
Un tensore è un termine generale per un array multidimensionale di numeri. Vettori (1D) e matrici (2D) sono casi particolari di tensori. In generale, i tensori possono avere un numero qualsiasi di dimensioni e rappresentano la struttura fondamentale per la rappresentazione dei dati in molte applicazioni di visione artificiale e apprendimento automatico.
Le immagini in scala di grigi hanno una forma (60, 60), il che significa che sono composte da 60 righe e 60 colonne, con ciascun pixel che rappresenta un singolo valore di intensità - è presente un solo canale colore. Al contrario, le immagini RGB hanno una forma (60, 60, 3), indicando la stessa risoluzione spaziale (60 righe e 60 colonne), ma con una dimensione aggiuntiva per il colore: ogni pixel contiene tre valori corrispondenti ai canali rosso, verde e blu che insieme definiscono il colore completo in quel punto.
Trasformazioni di Algebra Lineare per l'Elaborazione delle Immagini
Numerose manipolazioni delle immagini si basano su operazioni matriciali, rendendo l'algebra lineare una parte fondamentale della computer vision. Esaminiamo le trasformazioni più comunemente utilizzate.
Ridimensionamento dell'Immagine (Scaling)
Il ridimensionamento aumenta o diminuisce la dimensione di un'immagine. Si ottiene moltiplicando la matrice dell'immagine per una matrice di scaling:
dove sx e sy sono i fattori di scala per la larghezza e l'altezza, rispettivamente. Esempio: Se vogliamo raddoppiare la dimensione di un'immagine, utilizziamo:
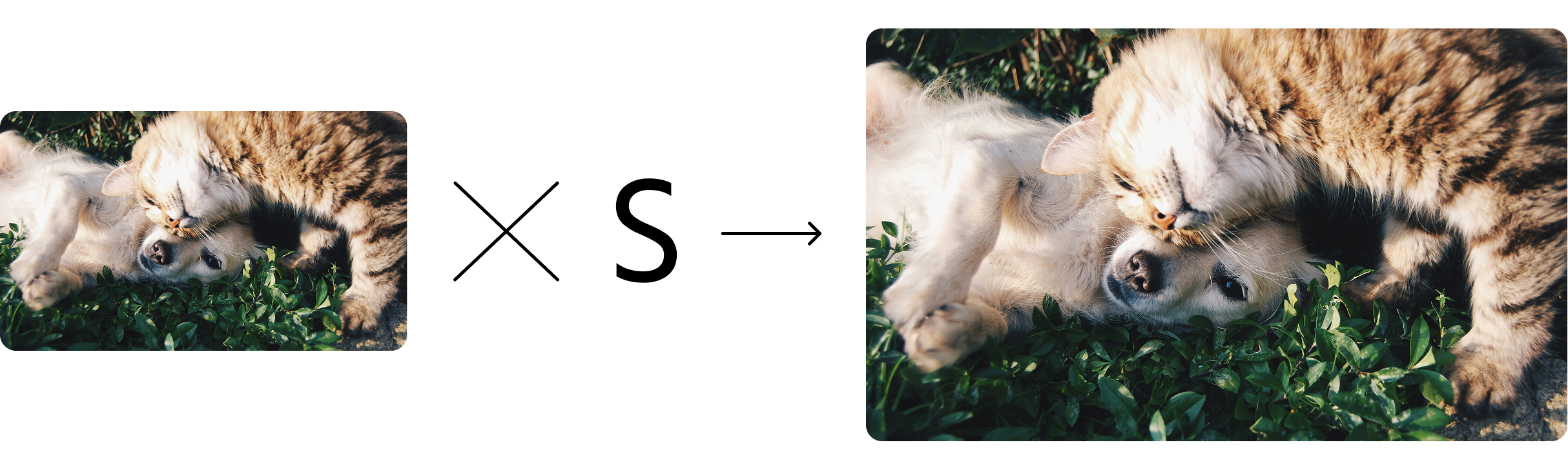
Moltiplicando questa matrice per le coordinate di ciascun pixel, l'immagine viene ingrandita.
Rotazione dell'immagine
Per ruotare un'immagine di un angolo θ, si utilizza una matrice di rotazione:
Ad esempio, la rotazione di un'immagine di 90 gradi in senso orario implica l'utilizzo di:
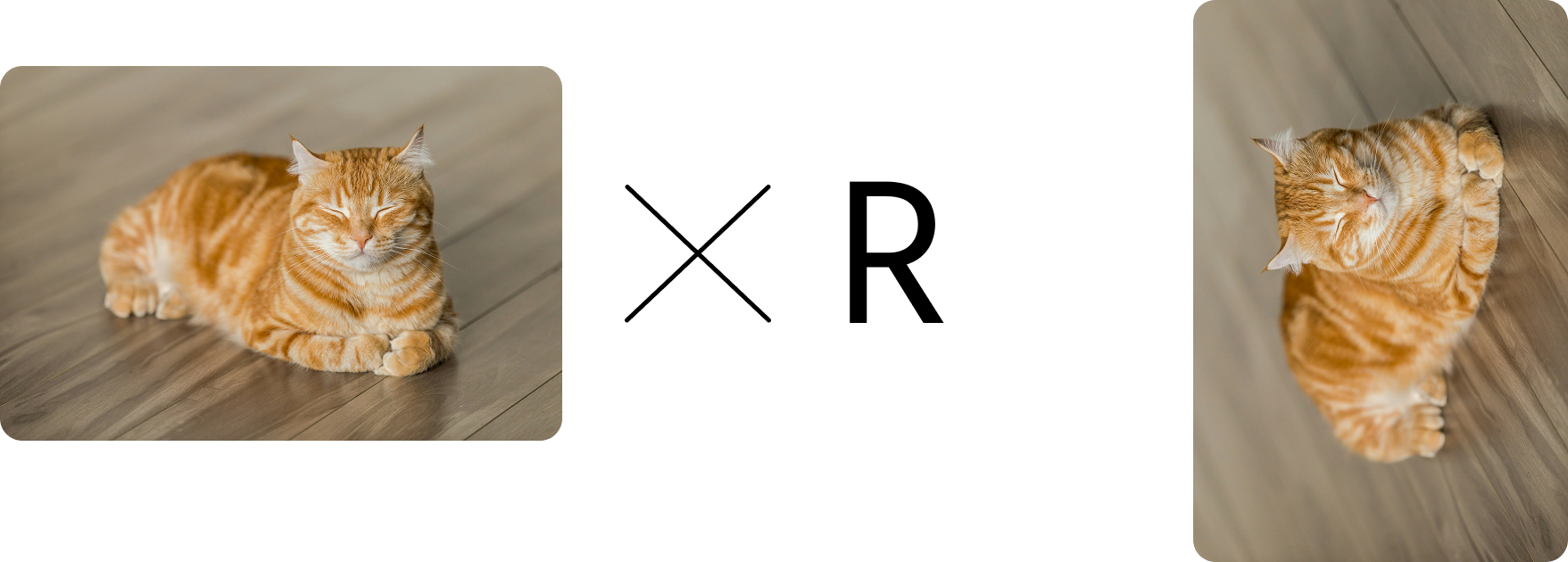
L'applicazione di questa trasformazione sposta ogni pixel in una nuova posizione, ruotando di fatto l'immagine.
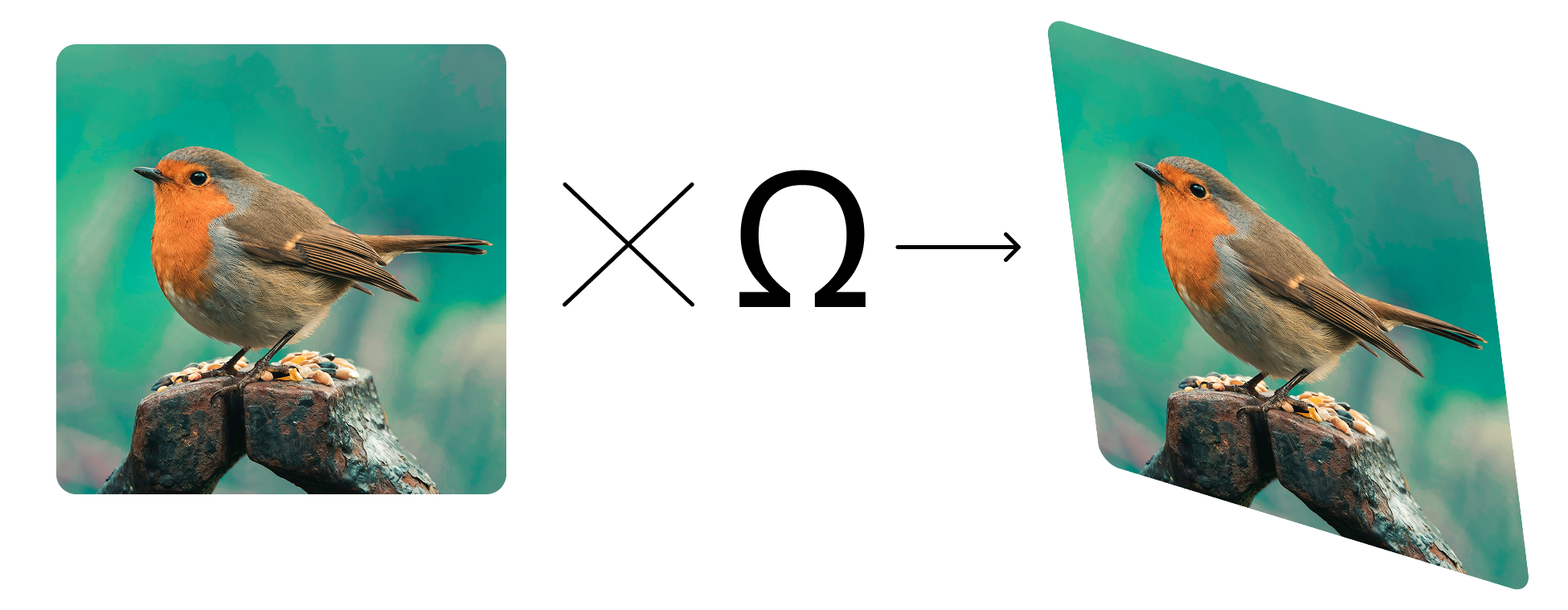
Shearing (Deformazione di un'immagine)
La deformazione distorce un'immagine spostando le sue righe o colonne. La matrice di trasformazione per la deformazione è:
dove ωx e ωy definiscono quanto l'immagine viene inclinata orizzontalmente e verticalmente. Spostamento di un'immagine del 30% in orizzontale e del 20% in verticale:
Perché l'algebra lineare è importante nella visione artificiale
L'algebra lineare è la base di molte operazioni di elaborazione delle immagini, tra cui:
- Rilevamento degli oggetti (le bounding box si basano su trasformazioni);
- Riconoscimento facciale (autovettori e PCA per l'estrazione delle caratteristiche);
- Miglioramento delle immagini (i filtri utilizzano convoluzioni di matrici);
- Reti neurali (i pesi sono memorizzati come matrici).
Comprendendo queste operazioni fondamentali, è possibile manipolare efficacemente le immagini e sviluppare applicazioni di visione artificiale più avanzate.
Grazie per i tuoi commenti!
Chieda ad AI
Chieda ad AI

Chieda pure quello che desidera o provi una delle domande suggerite per iniziare la nostra conversazione
Algebra Lineare per la Manipolazione delle Immagini
L'algebra lineare svolge un ruolo fondamentale nell'elaborazione delle immagini. Poiché le immagini digitali sono rappresentate come matrici di valori di pixel, operazioni matematiche come trasformazioni, ridimensionamenti e rotazioni possono essere eseguite tramite manipolazioni matriciali. Analizziamo i concetti essenziali di algebra lineare utilizzati nella computer vision.
Rappresentazione delle immagini come matrici
Un'immagine digitale è essenzialmente una griglia di pixel e ogni pixel ha un valore di intensità. Nelle immagini in scala di grigi, questa è una matrice 2D, dove ogni elemento corrisponde a un livello di luminosità (0 per il nero, 255 per il bianco). Ad esempio, una semplice immagine in scala di grigi 6×6 potrebbe apparire così:
Le immagini a colori, invece, sono matrici 3D (dette anche tensori), con livelli separati per Rosso, Verde e Blu (RGB).
Un tensore è un termine generale per un array multidimensionale di numeri. Vettori (1D) e matrici (2D) sono casi particolari di tensori. In generale, i tensori possono avere un numero qualsiasi di dimensioni e rappresentano la struttura fondamentale per la rappresentazione dei dati in molte applicazioni di visione artificiale e apprendimento automatico.
Le immagini in scala di grigi hanno una forma (60, 60), il che significa che sono composte da 60 righe e 60 colonne, con ciascun pixel che rappresenta un singolo valore di intensità - è presente un solo canale colore. Al contrario, le immagini RGB hanno una forma (60, 60, 3), indicando la stessa risoluzione spaziale (60 righe e 60 colonne), ma con una dimensione aggiuntiva per il colore: ogni pixel contiene tre valori corrispondenti ai canali rosso, verde e blu che insieme definiscono il colore completo in quel punto.
Trasformazioni di Algebra Lineare per l'Elaborazione delle Immagini
Numerose manipolazioni delle immagini si basano su operazioni matriciali, rendendo l'algebra lineare una parte fondamentale della computer vision. Esaminiamo le trasformazioni più comunemente utilizzate.
Ridimensionamento dell'Immagine (Scaling)
Il ridimensionamento aumenta o diminuisce la dimensione di un'immagine. Si ottiene moltiplicando la matrice dell'immagine per una matrice di scaling:
dove sx e sy sono i fattori di scala per la larghezza e l'altezza, rispettivamente. Esempio: Se vogliamo raddoppiare la dimensione di un'immagine, utilizziamo:
Moltiplicando questa matrice per le coordinate di ciascun pixel, l'immagine viene ingrandita.
Rotazione dell'immagine
Per ruotare un'immagine di un angolo θ, si utilizza una matrice di rotazione:
Ad esempio, la rotazione di un'immagine di 90 gradi in senso orario implica l'utilizzo di:
L'applicazione di questa trasformazione sposta ogni pixel in una nuova posizione, ruotando di fatto l'immagine.
Shearing (Deformazione di un'immagine)
La deformazione distorce un'immagine spostando le sue righe o colonne. La matrice di trasformazione per la deformazione è:
dove ωx e ωy definiscono quanto l'immagine viene inclinata orizzontalmente e verticalmente. Spostamento di un'immagine del 30% in orizzontale e del 20% in verticale:
Perché l'algebra lineare è importante nella visione artificiale
L'algebra lineare è la base di molte operazioni di elaborazione delle immagini, tra cui:
- Rilevamento degli oggetti (le bounding box si basano su trasformazioni);
- Riconoscimento facciale (autovettori e PCA per l'estrazione delle caratteristiche);
- Miglioramento delle immagini (i filtri utilizzano convoluzioni di matrici);
- Reti neurali (i pesi sono memorizzati come matrici).
Comprendendo queste operazioni fondamentali, è possibile manipolare efficacemente le immagini e sviluppare applicazioni di visione artificiale più avanzate.
Grazie per i tuoi commenti!
