Uitdaging: Het Bouwen van een CNN
Veeg om het menu te tonen
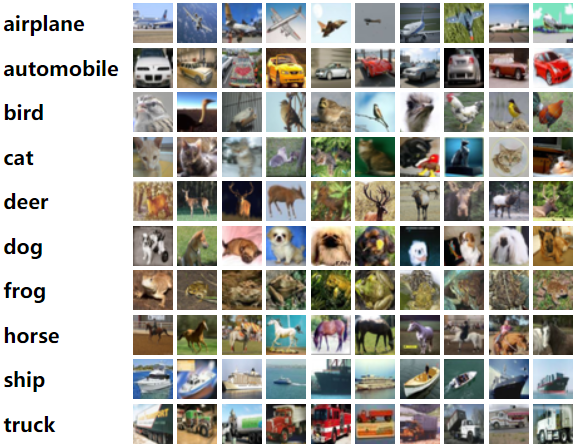
Convolutionele neurale netwerken (CNN's) worden veel gebruikt bij beeldclassificatie vanwege hun vermogen om hiërarchische kenmerken te extraheren. In deze opdracht implementeer en train je een VGG-achtig CNN met TensorFlow en Keras op de CIFAR-10 dataset. De dataset bestaat uit 60.000 afbeeldingen (32×32×3) die behoren tot 10 verschillende klassen, waaronder vliegtuigen, auto's, vogels, katten en meer.
Dit project begeleidt je bij het laden van de dataset, het preprocessen van de afbeeldingen, het definiëren van het CNN-model, het trainen ervan en het evalueren van de prestaties.
1. Data-preprocessing voor CNN's
Voor het trainen van een CNN is het preprocessen van de data een cruciale stap om betere prestaties en snellere convergentie te waarborgen. Veelgebruikte preprocessingsmethoden zijn:
-
Normalisatie: deze methode houdt in dat de pixelwaarden van afbeeldingen worden geschaald van een bereik tussen 0 en 255 naar een bereik tussen 0 en 1. Dit wordt vaak geïmplementeerd als
x_train / 255.0, x_test / 255.0; -
One-hot encoding: labels worden vaak omgezet in one-hot gecodeerde vectoren voor classificatietaken. Dit gebeurt doorgaans met de functie
keras.utils.to_categorical, die gehele labels (bijv. 0, 1, 2, enz.) omzet in een one-hot gecodeerde vector, zoals[1, 0, 0, 0]voor een classificatieprobleem met 4 klassen.
2. Het bouwen van de CNN-architectuur
Een CNN-architectuur bestaat uit meerdere lagen die verschillende taken uitvoeren om kenmerken te extraheren en voorspellingen te doen. Je kunt belangrijke CNN-lagen implementeren door:
Convolutionele laag (Conv2D)
keras.layers.Conv2D(filters, kernel_size, activation='relu', padding='same', input_shape=(height, width, channels))
De parameter input_shape hoeft alleen te worden opgegeven in de invoerlaag.
Pooling-laag (MaxPooling2D)
keras.layers.MaxPooling2D(pool_size=(2, 2))
Flatten-laag
keras.layers.Flatten()
Dense-laag
layers.Dense(units=512, activation='relu')
layers.Dense(10, activation='softmax')
De laatste dense-laag heeft doorgaans het aantal units gelijk aan het aantal klassen en gebruikt een softmax-activatiefunctie om een waarschijnlijkheidsverdeling over de klassen te genereren.
3. Modelcompilatie
Na het definiëren van de architectuur moet het model worden gecompileerd. Deze stap omvat het specificeren van de verliesfunctie, optimizer en metriek die het model tijdens het trainen zullen begeleiden. De volgende methoden worden vaak gebruikt in CNN's:
Optimizer (Adam)
De optimizer past de gewichten van het model aan om de verliesfunctie te minimaliseren. De Adam-optimizer is populair vanwege zijn efficiëntie en het vermogen om het leerproces tijdens het trainen aan te passen.
keras.optimizers.Adam()
Verliesfunctie (Categorical Crossentropy)
Voor multi-class classificatie wordt doorgaans categorical crossentropy gebruikt als verliesfunctie. Dit kan als volgt worden geïmplementeerd:
keras.losses.CategoricalCrossentropy()
Metriek
De modelprestaties worden gemonitord met behulp van metriek voor classificatietaken, zoals nauwkeurigheid, precisie, recall, enzovoort. Deze kunnen als volgt worden gedefinieerd:
metrics = [
keras.metrics.Accuracy(),
keras.metrics.Precision(),
keras.metrics.Recall()
]
Compileren
model.compile(optimizer='adam',
loss='categorical_crossentropy', # Or keras.losses.CategoricalCrossentropy()
metrics=metrics)
4. Het model trainen
Het trainen van een CNN houdt in dat de invoergegevens aan het netwerk worden aangeboden, het verlies wordt berekend en de gewichten worden bijgewerkt met behulp van backpropagation. Het trainingsproces wordt aangestuurd door de volgende belangrijke methoden:
- Het model fitten: de
fit()-methode wordt gebruikt om het model te trainen. Deze methode neemt de trainingsgegevens, het aantal epochs en de batchgrootte als invoer. Er is ook een optionele validatiesplit om de prestaties van het model op niet eerder geziene gegevens tijdens de training te evalueren:
history = model.fit(x_train, y_train, epochs=10, batch_size=32, validation_split=0.2)
- Batchgrootte en epochs: de batchgrootte bepaalt het aantal voorbeelden dat wordt verwerkt voordat de modelgewichten worden bijgewerkt, en het aantal epochs verwijst naar hoe vaak de volledige dataset door het model wordt gehaald.
5. Evaluatie
Classificatierapport
sklearn.metrics.classification_report() vergelijkt ware en voorspelde waarden uit de testdataset. Het bevat precisie, recall en F1-score voor elke klasse. De methoden vereisen alleen klassenlabels, dus vergeet niet deze terug te converteren van vectoren ([0,0,1,0] -> 2):
y_pred = model.predict(x_test)
y_pred_classes = np.argmax(y_pred,axis = 1)
y_test_classes = np.argmax(y_test, axis = 1)
report = classification_report(y_test_classes, y_pred_classes, target_names=class_names)
print(report)
Evalueren
Nadat het model is getraind, wordt het geëvalueerd op de testdataset om het generalisatievermogen te beoordelen. De evaluatie levert metriek op, die werden genoemd in de .compile()-methode. De evaluatie wordt uitgevoerd met .evaluate():
results = model.evaluate(x_test, y_test, verbose=2, return_dict=True)
Confusiematrix
Om meer inzicht te krijgen in de prestaties van het model, kunnen we de confusiematrix visualiseren, die de true positive, false positive, true negative en false negative voorspellingen voor elke klasse toont. De confusiematrix kan worden berekend met TensorFlow:
confusion_mtx = tf.math.confusion_matrix(y_test_classes, y_pred_classes)
Deze matrix kan vervolgens worden gevisualiseerd met behulp van heatmaps om te observeren hoe goed het model presteert op elke klasse:
plt.figure(figsize=(12, 9))
c = sns.heatmap(confusion_mtx, annot=True, fmt='g')
c.set(xticklabels=class_names, yticklabels=class_names)
plt.show()
Opdracht
1. Laad en preprocess het dataset
- Importeer het CIFAR-10 dataset vanuit Keras;
- Normaliseer de pixelwaarden naar het bereik
[0,1]voor betere convergentie; - Zet de klasse-labels om naar
one-hot encodedformaat voor categorische classificatie.
2. Definieer het CNN-model
Implementeer een VGG-achtige CNN-architectuur met de volgende belangrijke lagen:

Convolutionele lagen:
- Kernelgrootte:
3×3; - Activatiefunctie:
ReLU; - Padding:
'same'.
Pooling-lagen:
- Poolingtype:
max pooling; - Poolinggrootte:
2×2.
Dropout-lagen (Voorkom overfitting door willekeurig neuronen uit te schakelen):
- Dropout-percentage:
25%.
Flatten-laag - zet 2D feature maps om naar een 1D vector voor classificatie.
Volledig verbonden lagen - dense lagen voor uiteindelijke classificatie, met een relu- of softmax-uitvoerlaag.
Compileer het model met:
Adam optimizer(voor efficiënte training);Categorical cross-entropyverliesfunctie (voor multi-class classificatie);Accuracy metricom prestaties te meten (klassen zijn gebalanceerd, en je kunt zelf andere metrics toevoegen).
3. Train het model
- Specificeer
epochsenbatch_sizeparameters voor training (bijv.epochs=20, batch_size=64); - Specificeer de
validation_splitparameter om het percentage trainingsdata dat validatie wordt te bepalen om de modelprestaties op ongeziene afbeeldingen te volgen; - Sla de trainingsgeschiedenis op om trends in nauwkeurigheid en verlies te visualiseren.
4. Evalueer en visualiseer resultaten
- Test het model op CIFAR-10 testdata en print de nauwkeurigheid;
- Plot trainingsverlies versus validatieverlies om te controleren op overfitting;
- Plot trainingsnauwkeurigheid versus validatienauwkeurigheid om de voortgang van het leren te waarborgen.
Bedankt voor je feedback!
Vraag AI
Vraag AI

Vraag wat u wilt of probeer een van de voorgestelde vragen om onze chat te starten.
Uitdaging: Het Bouwen van een CNN
Convolutionele neurale netwerken (CNN's) worden veel gebruikt bij beeldclassificatie vanwege hun vermogen om hiërarchische kenmerken te extraheren. In deze opdracht implementeer en train je een VGG-achtig CNN met TensorFlow en Keras op de CIFAR-10 dataset. De dataset bestaat uit 60.000 afbeeldingen (32×32×3) die behoren tot 10 verschillende klassen, waaronder vliegtuigen, auto's, vogels, katten en meer.
Dit project begeleidt je bij het laden van de dataset, het preprocessen van de afbeeldingen, het definiëren van het CNN-model, het trainen ervan en het evalueren van de prestaties.
1. Data-preprocessing voor CNN's
Voor het trainen van een CNN is het preprocessen van de data een cruciale stap om betere prestaties en snellere convergentie te waarborgen. Veelgebruikte preprocessingsmethoden zijn:
-
Normalisatie: deze methode houdt in dat de pixelwaarden van afbeeldingen worden geschaald van een bereik tussen 0 en 255 naar een bereik tussen 0 en 1. Dit wordt vaak geïmplementeerd als
x_train / 255.0, x_test / 255.0; -
One-hot encoding: labels worden vaak omgezet in one-hot gecodeerde vectoren voor classificatietaken. Dit gebeurt doorgaans met de functie
keras.utils.to_categorical, die gehele labels (bijv. 0, 1, 2, enz.) omzet in een one-hot gecodeerde vector, zoals[1, 0, 0, 0]voor een classificatieprobleem met 4 klassen.
2. Het bouwen van de CNN-architectuur
Een CNN-architectuur bestaat uit meerdere lagen die verschillende taken uitvoeren om kenmerken te extraheren en voorspellingen te doen. Je kunt belangrijke CNN-lagen implementeren door:
Convolutionele laag (Conv2D)
keras.layers.Conv2D(filters, kernel_size, activation='relu', padding='same', input_shape=(height, width, channels))
De parameter input_shape hoeft alleen te worden opgegeven in de invoerlaag.
Pooling-laag (MaxPooling2D)
keras.layers.MaxPooling2D(pool_size=(2, 2))
Flatten-laag
keras.layers.Flatten()
Dense-laag
layers.Dense(units=512, activation='relu')
layers.Dense(10, activation='softmax')
De laatste dense-laag heeft doorgaans het aantal units gelijk aan het aantal klassen en gebruikt een softmax-activatiefunctie om een waarschijnlijkheidsverdeling over de klassen te genereren.
3. Modelcompilatie
Na het definiëren van de architectuur moet het model worden gecompileerd. Deze stap omvat het specificeren van de verliesfunctie, optimizer en metriek die het model tijdens het trainen zullen begeleiden. De volgende methoden worden vaak gebruikt in CNN's:
Optimizer (Adam)
De optimizer past de gewichten van het model aan om de verliesfunctie te minimaliseren. De Adam-optimizer is populair vanwege zijn efficiëntie en het vermogen om het leerproces tijdens het trainen aan te passen.
keras.optimizers.Adam()
Verliesfunctie (Categorical Crossentropy)
Voor multi-class classificatie wordt doorgaans categorical crossentropy gebruikt als verliesfunctie. Dit kan als volgt worden geïmplementeerd:
keras.losses.CategoricalCrossentropy()
Metriek
De modelprestaties worden gemonitord met behulp van metriek voor classificatietaken, zoals nauwkeurigheid, precisie, recall, enzovoort. Deze kunnen als volgt worden gedefinieerd:
metrics = [
keras.metrics.Accuracy(),
keras.metrics.Precision(),
keras.metrics.Recall()
]
Compileren
model.compile(optimizer='adam',
loss='categorical_crossentropy', # Or keras.losses.CategoricalCrossentropy()
metrics=metrics)
4. Het model trainen
Het trainen van een CNN houdt in dat de invoergegevens aan het netwerk worden aangeboden, het verlies wordt berekend en de gewichten worden bijgewerkt met behulp van backpropagation. Het trainingsproces wordt aangestuurd door de volgende belangrijke methoden:
- Het model fitten: de
fit()-methode wordt gebruikt om het model te trainen. Deze methode neemt de trainingsgegevens, het aantal epochs en de batchgrootte als invoer. Er is ook een optionele validatiesplit om de prestaties van het model op niet eerder geziene gegevens tijdens de training te evalueren:
history = model.fit(x_train, y_train, epochs=10, batch_size=32, validation_split=0.2)
- Batchgrootte en epochs: de batchgrootte bepaalt het aantal voorbeelden dat wordt verwerkt voordat de modelgewichten worden bijgewerkt, en het aantal epochs verwijst naar hoe vaak de volledige dataset door het model wordt gehaald.
5. Evaluatie
Classificatierapport
sklearn.metrics.classification_report() vergelijkt ware en voorspelde waarden uit de testdataset. Het bevat precisie, recall en F1-score voor elke klasse. De methoden vereisen alleen klassenlabels, dus vergeet niet deze terug te converteren van vectoren ([0,0,1,0] -> 2):
y_pred = model.predict(x_test)
y_pred_classes = np.argmax(y_pred,axis = 1)
y_test_classes = np.argmax(y_test, axis = 1)
report = classification_report(y_test_classes, y_pred_classes, target_names=class_names)
print(report)
Evalueren
Nadat het model is getraind, wordt het geëvalueerd op de testdataset om het generalisatievermogen te beoordelen. De evaluatie levert metriek op, die werden genoemd in de .compile()-methode. De evaluatie wordt uitgevoerd met .evaluate():
results = model.evaluate(x_test, y_test, verbose=2, return_dict=True)
Confusiematrix
Om meer inzicht te krijgen in de prestaties van het model, kunnen we de confusiematrix visualiseren, die de true positive, false positive, true negative en false negative voorspellingen voor elke klasse toont. De confusiematrix kan worden berekend met TensorFlow:
confusion_mtx = tf.math.confusion_matrix(y_test_classes, y_pred_classes)
Deze matrix kan vervolgens worden gevisualiseerd met behulp van heatmaps om te observeren hoe goed het model presteert op elke klasse:
plt.figure(figsize=(12, 9))
c = sns.heatmap(confusion_mtx, annot=True, fmt='g')
c.set(xticklabels=class_names, yticklabels=class_names)
plt.show()
Opdracht
1. Laad en preprocess het dataset
- Importeer het CIFAR-10 dataset vanuit Keras;
- Normaliseer de pixelwaarden naar het bereik
[0,1]voor betere convergentie; - Zet de klasse-labels om naar
one-hot encodedformaat voor categorische classificatie.
2. Definieer het CNN-model
Implementeer een VGG-achtige CNN-architectuur met de volgende belangrijke lagen:
Convolutionele lagen:
- Kernelgrootte:
3×3; - Activatiefunctie:
ReLU; - Padding:
'same'.
Pooling-lagen:
- Poolingtype:
max pooling; - Poolinggrootte:
2×2.
Dropout-lagen (Voorkom overfitting door willekeurig neuronen uit te schakelen):
- Dropout-percentage:
25%.
Flatten-laag - zet 2D feature maps om naar een 1D vector voor classificatie.
Volledig verbonden lagen - dense lagen voor uiteindelijke classificatie, met een relu- of softmax-uitvoerlaag.
Compileer het model met:
Adam optimizer(voor efficiënte training);Categorical cross-entropyverliesfunctie (voor multi-class classificatie);Accuracy metricom prestaties te meten (klassen zijn gebalanceerd, en je kunt zelf andere metrics toevoegen).
3. Train het model
- Specificeer
epochsenbatch_sizeparameters voor training (bijv.epochs=20, batch_size=64); - Specificeer de
validation_splitparameter om het percentage trainingsdata dat validatie wordt te bepalen om de modelprestaties op ongeziene afbeeldingen te volgen; - Sla de trainingsgeschiedenis op om trends in nauwkeurigheid en verlies te visualiseren.
4. Evalueer en visualiseer resultaten
- Test het model op CIFAR-10 testdata en print de nauwkeurigheid;
- Plot trainingsverlies versus validatieverlies om te controleren op overfitting;
- Plot trainingsnauwkeurigheid versus validatienauwkeurigheid om de voortgang van het leren te waarborgen.
Bedankt voor je feedback!
