Overzicht van het YOLO-Model
Veeg om het menu te tonen
Het YOLO (You Only Look Once) algoritme is een snel en efficiënt objectdetectiemodel. In tegenstelling tot traditionele benaderingen zoals R-CNN die meerdere stappen gebruiken, verwerkt YOLO de volledige afbeelding in één keer, waardoor het ideaal is voor toepassingen in real-time.
Hoe YOLO Verschilt van R-CNN Benaderingen
Traditionele objectdetectiemethoden, zoals R-CNN en zijn varianten, maken gebruik van een twee-staps pijplijn: eerst het genereren van regio-voorstellen, daarna het classificeren van elke voorgestelde regio. Hoewel effectief, is deze aanpak computationeel intensief en vertraagt het de inferentie, waardoor het minder geschikt is voor real-time toepassingen.
YOLO (You Only Look Once) hanteert een radicaal andere aanpak. Het verdeelt de invoerafbeelding in een raster en voorspelt bounding boxes en klassekansen voor elke cel in één enkele forward pass. Dit ontwerp beschouwt objectdetectie als een enkel regressieprobleem, waardoor YOLO real-time prestaties behaalt.
In tegenstelling tot R-CNN-gebaseerde methoden die zich alleen richten op lokale regio's, verwerkt YOLO de volledige afbeelding tegelijk, waardoor het globale contextuele informatie kan vastleggen. Dit leidt tot betere prestaties bij het detecteren van meerdere of overlappende objecten, terwijl hoge snelheid en nauwkeurigheid behouden blijven.
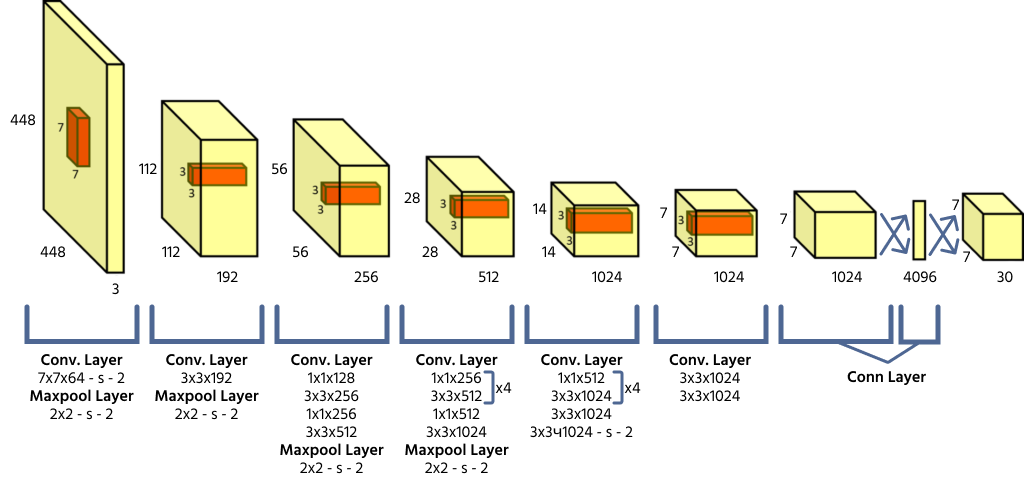
YOLO Architectuur en Rastergebaseerde Voorspellingen
YOLO verdeelt een invoerafbeelding in een S × S raster, waarbij elke rastercel verantwoordelijk is voor het detecteren van objecten waarvan het midden binnen de cel valt. Elke cel voorspelt coördinaten van de bounding box (x, y, breedte, hoogte), een objectvertrouwensscore en klassekansen. Omdat YOLO de volledige afbeelding in één forward pass verwerkt, is het zeer efficiënt in vergelijking met eerdere objectdetectiemodellen.
Verliesfunctie en Klassevertrouwensscores
YOLO optimaliseert detectienauwkeurigheid met een aangepaste verliesfunctie, die bestaat uit:
- Localisatieverlies: meet de nauwkeurigheid van het begrenzingsvak;
- Vertrouwensverlies: zorgt ervoor dat voorspellingen correct aangeven of er een object aanwezig is;
- Classificatieverlies: beoordeelt hoe goed de voorspelde klasse overeenkomt met de werkelijke klasse.
Om de resultaten te verbeteren, past YOLO anchor boxes en non-max suppression (NMS) toe om dubbele detecties te verwijderen.
Voordelen van YOLO: Afweging tussen Snelheid en Nauwkeurigheid
Het belangrijkste voordeel van YOLO is snelheid. Omdat detectie in één enkele stap plaatsvindt, is YOLO veel sneller dan R-CNN-gebaseerde methoden, waardoor het geschikt is voor realtime toepassingen zoals autonoom rijden en bewaking. Vroege versies van YOLO hadden echter moeite met het detecteren van kleine objecten, wat in latere versies is verbeterd.
YOLO: Een Korte Geschiedenis
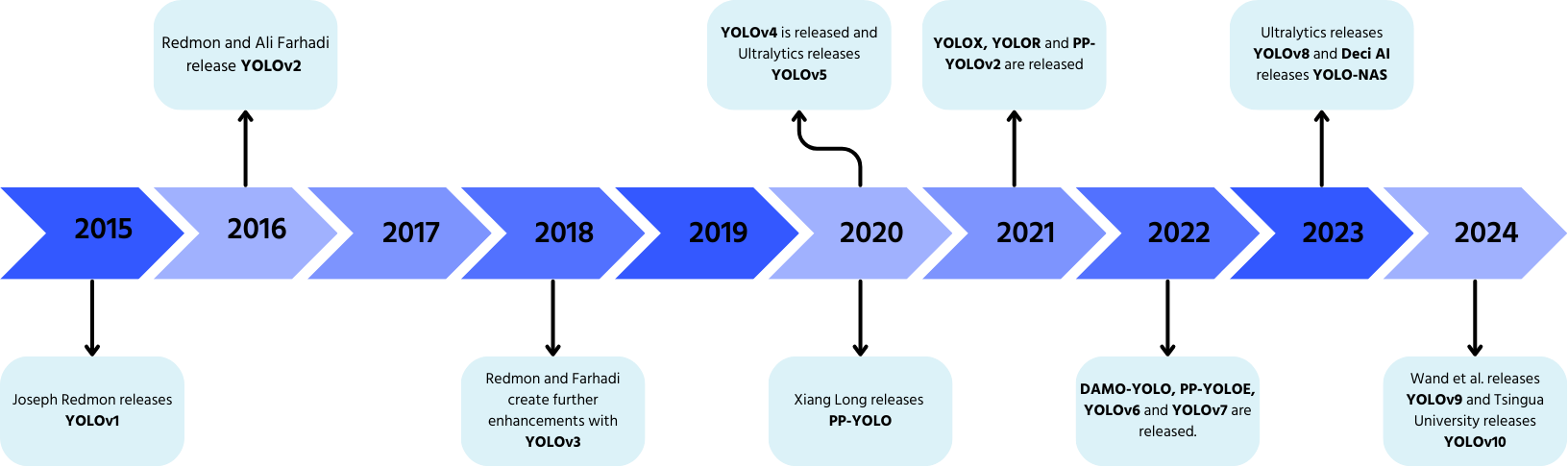
YOLO, ontwikkeld door Joseph Redmon en Ali Farhadi in 2015, bracht een revolutie teweeg in objectdetectie met zijn single-pass verwerking.
- YOLOv2 (2016): voegde batchnormalisatie, anchor boxes en dimensieclusters toe;
- YOLOv3 (2018): introduceerde een efficiëntere backbone, meerdere anchors en spatial pyramid pooling;
- YOLOv4 (2020): voegde Mosaic data-augmentatie, een anchor-free detectiekop en een nieuwe verliesfunctie toe;
- YOLOv5: verbeterde prestaties met hyperparameteroptimalisatie, experimenttracking en automatische exportfuncties;
- YOLOv6 (2022): open-source gemaakt door Meituan en gebruikt in autonome bezorgrobots;
- YOLOv7: uitgebreide mogelijkheden met pose-estimatie;
- YOLOv8 (2023): verbeterde snelheid, flexibiliteit en efficiëntie voor vision AI-taken;
- YOLOv9: introduceerde Programmable Gradient Information (PGI) en het Generalized Efficient Layer Aggregation Network (GELAN);
- YOLOv10: ontwikkeld door Tsinghua University, elimineert Non-Maximum Suppression (NMS) met een End-to-End detectiekop;
- YOLOv11: het nieuwste model met state-of-the-art prestaties voor objectdetectie, segmentatie en classificatie.
Bedankt voor je feedback!
Vraag AI
Vraag AI

Vraag wat u wilt of probeer een van de voorgestelde vragen om onze chat te starten.
