Generativa Adversariella Nätverk (GANs)
Svep för att visa menyn
Generativa adversariella nätverk (GANs) är en klass av generativa modeller som introducerades av Ian Goodfellow 2014. De består av två neurala nätverk — Generatorn och Diskriminatorn — som tränas samtidigt inom ett spelteoretiskt ramverk. Generatorn försöker skapa data som liknar verklig data, medan diskriminatorn försöker särskilja verklig data från genererad data.
GANs lär sig att generera dataprover från brus genom att lösa ett minimaxspel. Under träningens gång blir generatorn bättre på att producera realistisk data, och diskriminatorn blir bättre på att skilja mellan verklig och falsk data.
Arkitektur för en GAN
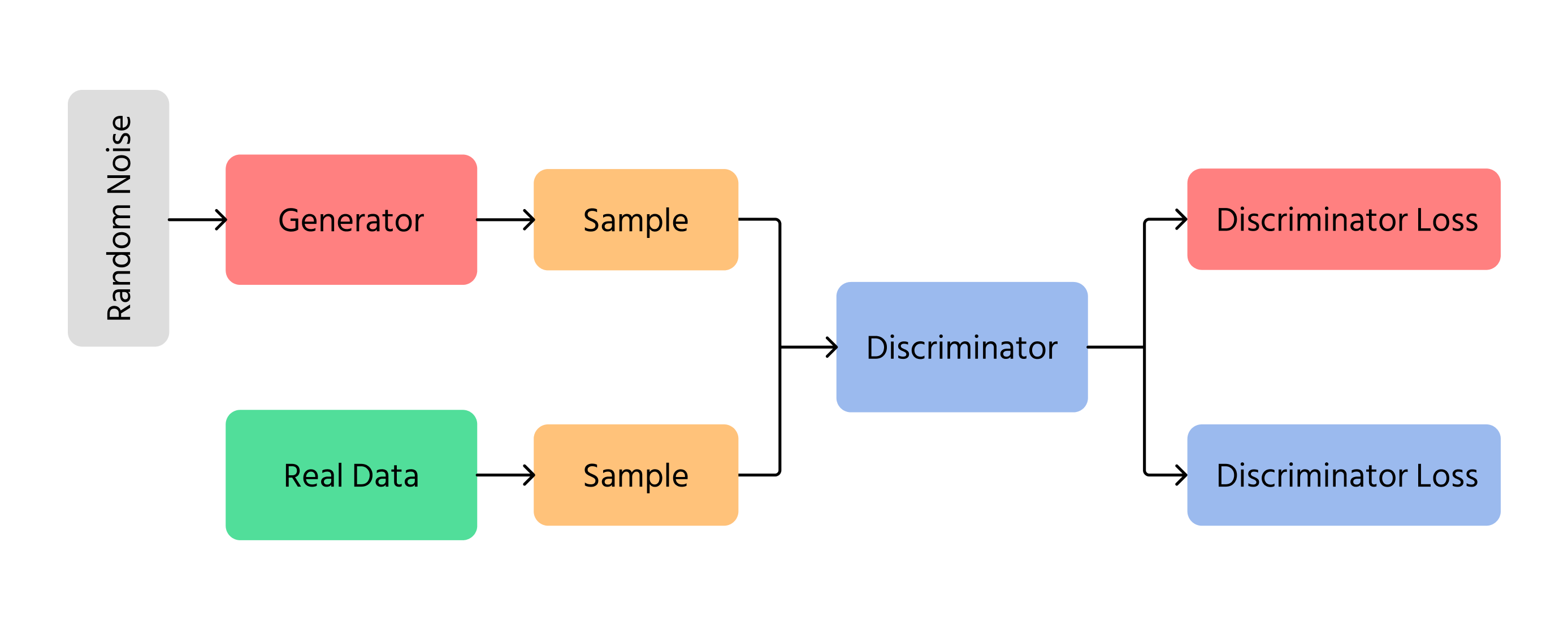
En grundläggande GAN-modell består av två kärnkomponenter:
1. Generator (G)
- Tar en slumpmässig brusvektor z∼pz(z) som indata;
- Transformerar den genom ett neuralt nätverk till ett dataprover G(z) som är avsett att likna data från den sanna fördelningen.
2. Discriminator (D)
- Tar antingen ett verkligt dataprover x∼px(x) eller ett genererat prov G(z);
- Returnerar ett skalärt värde mellan 0 och 1, som uppskattar sannolikheten att indata är verklig.
Dessa två komponenter tränas samtidigt. Generatorn syftar till att producera realistiska prover för att lura diskriminatorn, medan diskriminatorn syftar till att korrekt identifiera verkliga kontra genererade prover.
Minimax-spelet i GANs
I kärnan av GANs finns minimax-spelet, ett begrepp från spelteorin. I denna uppställning:
- Generatorn G och diskriminatorn D är tävlande spelare;
- D strävar efter att maximera sin förmåga att skilja mellan verklig och genererad data;
- G strävar efter att minimera D:s förmåga att upptäcka dess falska data.
Denna dynamik definierar ett nollsummespel, där den enes vinst är den andres förlust. Optimeringen definieras som:
GminDmaxV(D,G)=Ex∼px[logD(x)]+Ez∼pz[log(1−D(G(z)))]Generatorn försöker lura diskriminatorn genom att generera exempel G(z) som är så nära verklig data som möjligt.
Förlustfunktioner
Även om det ursprungliga GAN-målet definierar ett minimax-spel, används i praktiken alternativa förlustfunktioner för att stabilisera träningen.
- Icke-mättande generatorförlust:
Detta hjälper generatorn att få starka gradienter även när diskriminatorn presterar bra.
- Diskriminatorförlust:
Dessa förluster uppmuntrar generatorn att producera exempel som ökar diskriminatorns osäkerhet och förbättrar konvergensen under träningen.
Viktiga varianter av GAN-arkitekturer
Flera typer av GANs har utvecklats för att hantera specifika begränsningar eller för att förbättra prestandan:

Villkorlig GAN (cGAN)
Villkorliga GANs utökar det standardiserade GAN-ramverket genom att införa ytterligare information (vanligtvis etiketter) i både generatorn och diskriminatorn. Istället för att generera data enbart från slumpmässigt brus får generatorn både brus z och ett villkor y (t.ex. en klassetikett). Diskriminatorn får också y för att avgöra om exemplet är realistiskt under det villkoret.
- Användningsområden: klassvillkorad bildgenerering, bild-till-bild-översättning, text-till-bild-generering.
Djup konvolutionell GAN (DCGAN)
DCGANs ersätter de helt anslutna lagren i de ursprungliga GANs med konvolutionella och transponerade konvolutionella lager, vilket gör dem mer effektiva för bildgenerering. De introducerar också arkitektoniska riktlinjer som att ta bort helt anslutna lager, använda batchnormalisering och använda ReLU/LeakyReLU-aktiveringar.
- Användningsområden: fotorealistisk bildgenerering, inlärning av visuella representationer, oövervakad funktionsinlärning.
CycleGAN CycleGANs hanterar problemet med oparad bild-till-bild-översättning. Till skillnad från andra modeller som kräver parade datamängder (t.ex. samma foto i två olika stilar), kan CycleGANs lära sig mappningar mellan två domäner utan parade exempel. De introducerar två generatorer och två diskriminatorer, där varje ansvarar för mappning i en riktning (t.ex. foton till målningar och tvärtom), och tillämpar en cykelkonsistensförlust för att säkerställa att en översättning från en domän och tillbaka återger den ursprungliga bilden. Denna förlust är avgörande för att bevara innehåll och struktur.
Cykelkonsistensförlust säkerställer:
GBA(GAB(x))≈x och GAB(GBA(y))≈yDär:
- GAB mappar bilder från domän A till domän B;
- GBA mappar från domän B till domän A.
- x∈A,y∈B.
Användningsområden: konvertering av foto till konstverk, översättning mellan häst och zebra, röstomvandling mellan talare.
StyleGAN
StyleGAN, utvecklad av NVIDIA, introducerar stilbaserad kontroll i generatorn. Istället för att mata in en brusvektor direkt till generatorn, passerar den genom ett mappningsnätverk för att producera "stilvektorer" som påverkar varje lager i generatorn. Detta möjliggör finjusterad kontroll över visuella egenskaper såsom hårfärg, ansiktsuttryck eller belysning.
Anmärkningsvärda innovationer:
- Stilblandning, möjliggör kombination av flera latenta koder;
- Adaptiv instansnormalisering (AdaIN), styr feature maps i generatorn;
- Progressiv tillväxt, träningen startar med låg upplösning och ökar över tid.
Användningsområden: generering av ultrahögupplösta bilder (t.ex. ansikten), kontroll av visuella attribut, konstgenerering.
Jämförelse: GANs vs VAEs
GAN:er är en kraftfull klass av generativa modeller som kan producera mycket realistisk data genom en adversariell träningsprocess. Kärnan är ett minimaxspel mellan två nätverk, där adversariella förluster används för att iterativt förbättra båda komponenterna. En god förståelse för deras arkitektur, förlustfunktioner—inklusive varianter som cGAN, DCGAN, CycleGAN och StyleGAN—och deras kontrast mot andra modeller som VAE:er ger praktiker den nödvändiga grunden för tillämpningar inom områden som bildgenerering, videosyntes, dataförstärkning och mer.
1. Vilket av följande beskriver bäst komponenterna i en grundläggande GAN-arkitektur?
2. Vad är målet med minimax-spelet i GANs?
3. Vilket av följande påståenden är sant om skillnaden mellan GANs och VAEs?
Tack för dina kommentarer!
Fråga AI
Fråga AI

Fråga vad du vill eller prova någon av de föreslagna frågorna för att starta vårt samtal
Generativa Adversariella Nätverk (GANs)
Generativa adversariella nätverk (GANs) är en klass av generativa modeller som introducerades av Ian Goodfellow 2014. De består av två neurala nätverk — Generatorn och Diskriminatorn — som tränas samtidigt inom ett spelteoretiskt ramverk. Generatorn försöker skapa data som liknar verklig data, medan diskriminatorn försöker särskilja verklig data från genererad data.
GANs lär sig att generera dataprover från brus genom att lösa ett minimaxspel. Under träningens gång blir generatorn bättre på att producera realistisk data, och diskriminatorn blir bättre på att skilja mellan verklig och falsk data.
Arkitektur för en GAN
En grundläggande GAN-modell består av två kärnkomponenter:
1. Generator (G)
- Tar en slumpmässig brusvektor z∼pz(z) som indata;
- Transformerar den genom ett neuralt nätverk till ett dataprover G(z) som är avsett att likna data från den sanna fördelningen.
2. Discriminator (D)
- Tar antingen ett verkligt dataprover x∼px(x) eller ett genererat prov G(z);
- Returnerar ett skalärt värde mellan 0 och 1, som uppskattar sannolikheten att indata är verklig.
Dessa två komponenter tränas samtidigt. Generatorn syftar till att producera realistiska prover för att lura diskriminatorn, medan diskriminatorn syftar till att korrekt identifiera verkliga kontra genererade prover.
Minimax-spelet i GANs
I kärnan av GANs finns minimax-spelet, ett begrepp från spelteorin. I denna uppställning:
- Generatorn G och diskriminatorn D är tävlande spelare;
- D strävar efter att maximera sin förmåga att skilja mellan verklig och genererad data;
- G strävar efter att minimera D:s förmåga att upptäcka dess falska data.
Denna dynamik definierar ett nollsummespel, där den enes vinst är den andres förlust. Optimeringen definieras som:
GminDmaxV(D,G)=Ex∼px[logD(x)]+Ez∼pz[log(1−D(G(z)))]Generatorn försöker lura diskriminatorn genom att generera exempel G(z) som är så nära verklig data som möjligt.
Förlustfunktioner
Även om det ursprungliga GAN-målet definierar ett minimax-spel, används i praktiken alternativa förlustfunktioner för att stabilisera träningen.
- Icke-mättande generatorförlust:
Detta hjälper generatorn att få starka gradienter även när diskriminatorn presterar bra.
- Diskriminatorförlust:
Dessa förluster uppmuntrar generatorn att producera exempel som ökar diskriminatorns osäkerhet och förbättrar konvergensen under träningen.
Viktiga varianter av GAN-arkitekturer
Flera typer av GANs har utvecklats för att hantera specifika begränsningar eller för att förbättra prestandan:
Villkorlig GAN (cGAN)
Villkorliga GANs utökar det standardiserade GAN-ramverket genom att införa ytterligare information (vanligtvis etiketter) i både generatorn och diskriminatorn. Istället för att generera data enbart från slumpmässigt brus får generatorn både brus z och ett villkor y (t.ex. en klassetikett). Diskriminatorn får också y för att avgöra om exemplet är realistiskt under det villkoret.
- Användningsområden: klassvillkorad bildgenerering, bild-till-bild-översättning, text-till-bild-generering.
Djup konvolutionell GAN (DCGAN)
DCGANs ersätter de helt anslutna lagren i de ursprungliga GANs med konvolutionella och transponerade konvolutionella lager, vilket gör dem mer effektiva för bildgenerering. De introducerar också arkitektoniska riktlinjer som att ta bort helt anslutna lager, använda batchnormalisering och använda ReLU/LeakyReLU-aktiveringar.
- Användningsområden: fotorealistisk bildgenerering, inlärning av visuella representationer, oövervakad funktionsinlärning.
CycleGAN CycleGANs hanterar problemet med oparad bild-till-bild-översättning. Till skillnad från andra modeller som kräver parade datamängder (t.ex. samma foto i två olika stilar), kan CycleGANs lära sig mappningar mellan två domäner utan parade exempel. De introducerar två generatorer och två diskriminatorer, där varje ansvarar för mappning i en riktning (t.ex. foton till målningar och tvärtom), och tillämpar en cykelkonsistensförlust för att säkerställa att en översättning från en domän och tillbaka återger den ursprungliga bilden. Denna förlust är avgörande för att bevara innehåll och struktur.
Cykelkonsistensförlust säkerställer:
GBA(GAB(x))≈x och GAB(GBA(y))≈yDär:
- GAB mappar bilder från domän A till domän B;
- GBA mappar från domän B till domän A.
- x∈A,y∈B.
Användningsområden: konvertering av foto till konstverk, översättning mellan häst och zebra, röstomvandling mellan talare.
StyleGAN
StyleGAN, utvecklad av NVIDIA, introducerar stilbaserad kontroll i generatorn. Istället för att mata in en brusvektor direkt till generatorn, passerar den genom ett mappningsnätverk för att producera "stilvektorer" som påverkar varje lager i generatorn. Detta möjliggör finjusterad kontroll över visuella egenskaper såsom hårfärg, ansiktsuttryck eller belysning.
Anmärkningsvärda innovationer:
- Stilblandning, möjliggör kombination av flera latenta koder;
- Adaptiv instansnormalisering (AdaIN), styr feature maps i generatorn;
- Progressiv tillväxt, träningen startar med låg upplösning och ökar över tid.
Användningsområden: generering av ultrahögupplösta bilder (t.ex. ansikten), kontroll av visuella attribut, konstgenerering.
Jämförelse: GANs vs VAEs
GAN:er är en kraftfull klass av generativa modeller som kan producera mycket realistisk data genom en adversariell träningsprocess. Kärnan är ett minimaxspel mellan två nätverk, där adversariella förluster används för att iterativt förbättra båda komponenterna. En god förståelse för deras arkitektur, förlustfunktioner—inklusive varianter som cGAN, DCGAN, CycleGAN och StyleGAN—och deras kontrast mot andra modeller som VAE:er ger praktiker den nödvändiga grunden för tillämpningar inom områden som bildgenerering, videosyntes, dataförstärkning och mer.
Tack för dina kommentarer!
