Linjär Algebra för Bildmanipulation
Svep för att visa menyn
Linjär algebra spelar en avgörande roll inom bildbehandling. Eftersom digitala bilder representeras som matriser av pixelvärden kan matematiska operationer såsom transformationer, skalning och rotationer utföras med hjälp av matrismultiplikationer. Här följer en genomgång av de grundläggande linjära algebraiska begreppen som används inom datorseende.
Bildrepresentation som matriser
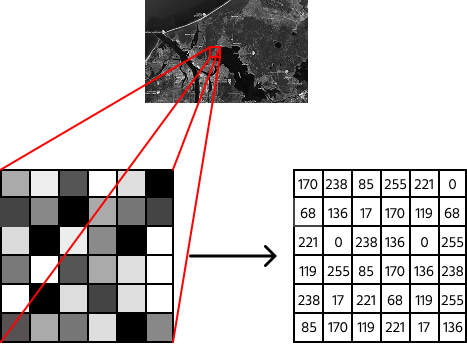
En digital bild är i grunden ett rutnät av pixlar, där varje pixel har ett intensitetsvärde. I gråskalebilder är detta en 2D-matris, där varje post motsvarar en ljusstyrkenivå (0 för svart, 255 för vitt). Till exempel kan en enkel 6×6 gråskalebild se ut så här:
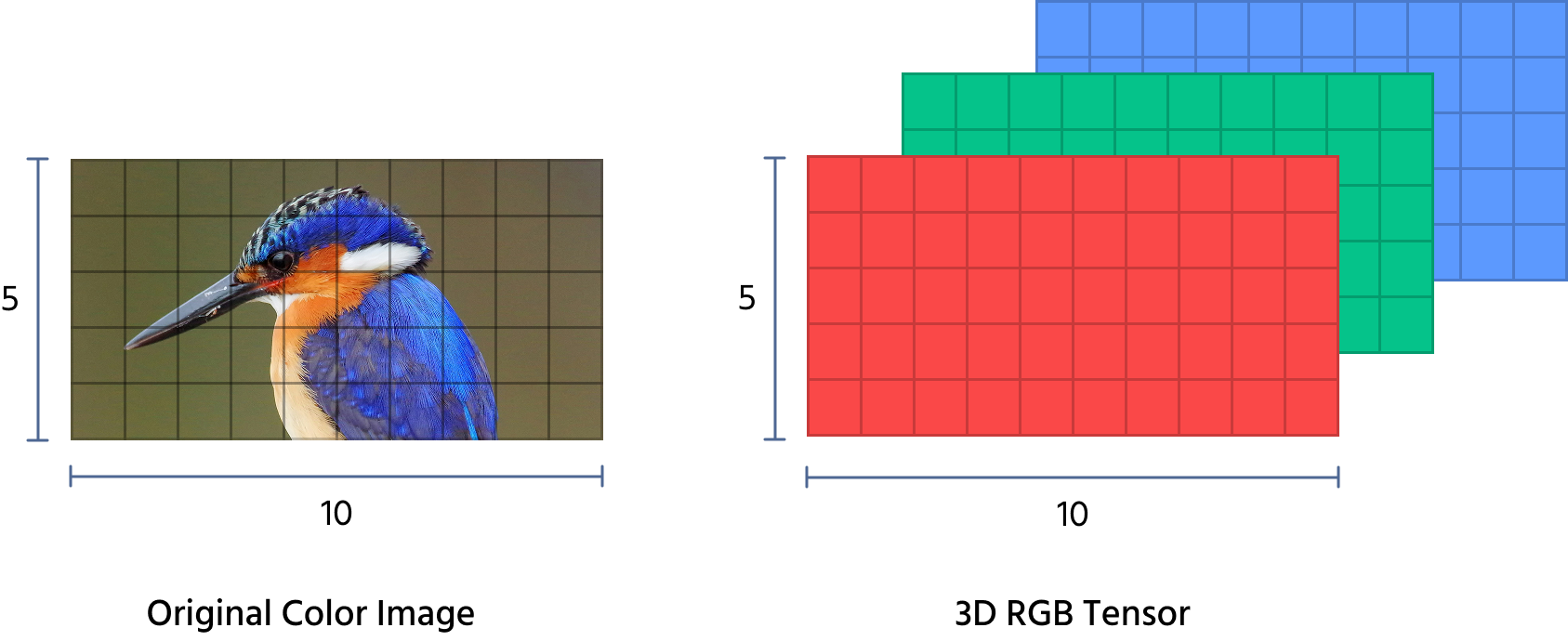
Färgbilder å andra sidan är 3D-matriser (även kallade tensorer), med separata lager för Röd, Grön och Blå (RGB).
En tensor är en allmän term för en flerdimensionell matris av tal. Vektorer (1D) och matriser (2D) är speciella fall av tensorer. Generellt kan tensorer ha godtyckligt antal dimensioner och fungerar som grundläggande struktur för att representera data i många datorseende- och maskininlärningsapplikationer.
Gråskalebilder har formen (60, 60), vilket innebär att de består av 60 rader och 60 kolumner, där varje pixel representerar ett enda intensitetsvärde – det finns endast en färgkanal. Däremot har RGB-bilder formen (60, 60, 3), vilket anger samma rumsliga upplösning (60 rader och 60 kolumner), men med en extra dimension för färg: varje pixel innehåller tre värden som motsvarar de röda, gröna och blå kanalerna som tillsammans definierar den fullständiga färgen vid den punkten.
Linjära algebraiska transformationer för bildbehandling
Flera bildmanipulationer bygger på matrismatematik, vilket gör linjär algebra till en central del av datorseende. Här följer de vanligaste transformationerna.
Bildskalning (ändring av storlek)
Skalning ökar eller minskar storleken på en bild. Detta uppnås genom att multiplicera bildmatrisen med en skalningsmatris:
där sx och sy är skalningsfaktorer för bredd respektive höjd. Exempel: Om vi vill fördubbla storleken på en bild använder vi:
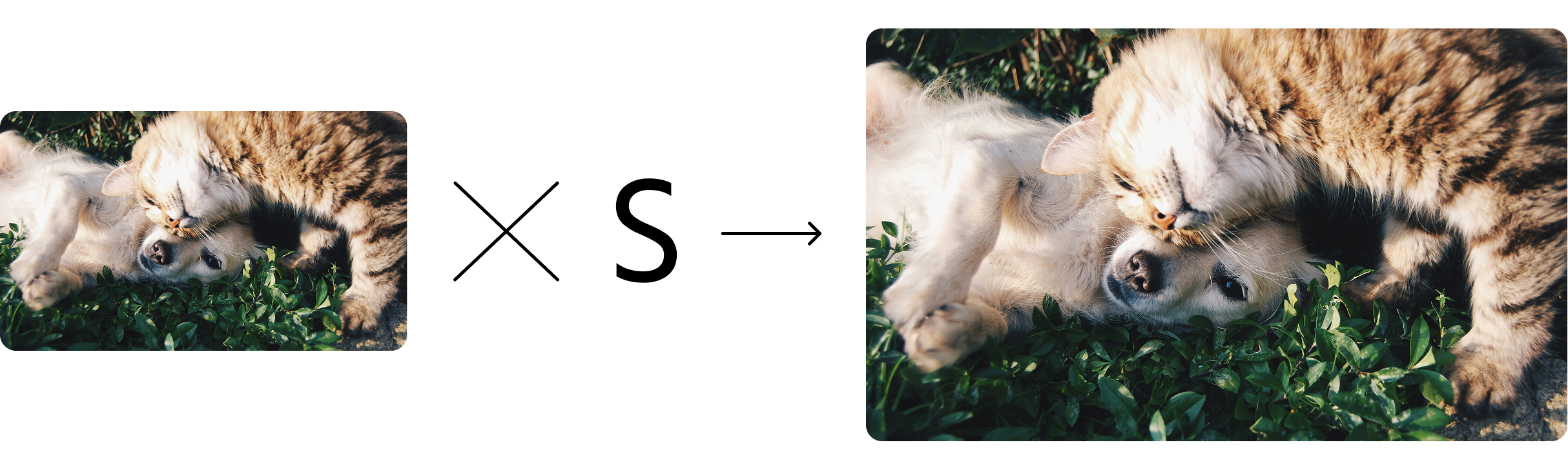
Multiplicera denna matris med varje pixels koordinater skalar upp bilden.
Bildrotation
För att rotera en bild med en vinkel θ används en rotationsmatris:
Till exempel innebär en rotation av en bild 90 grader medurs att använda:
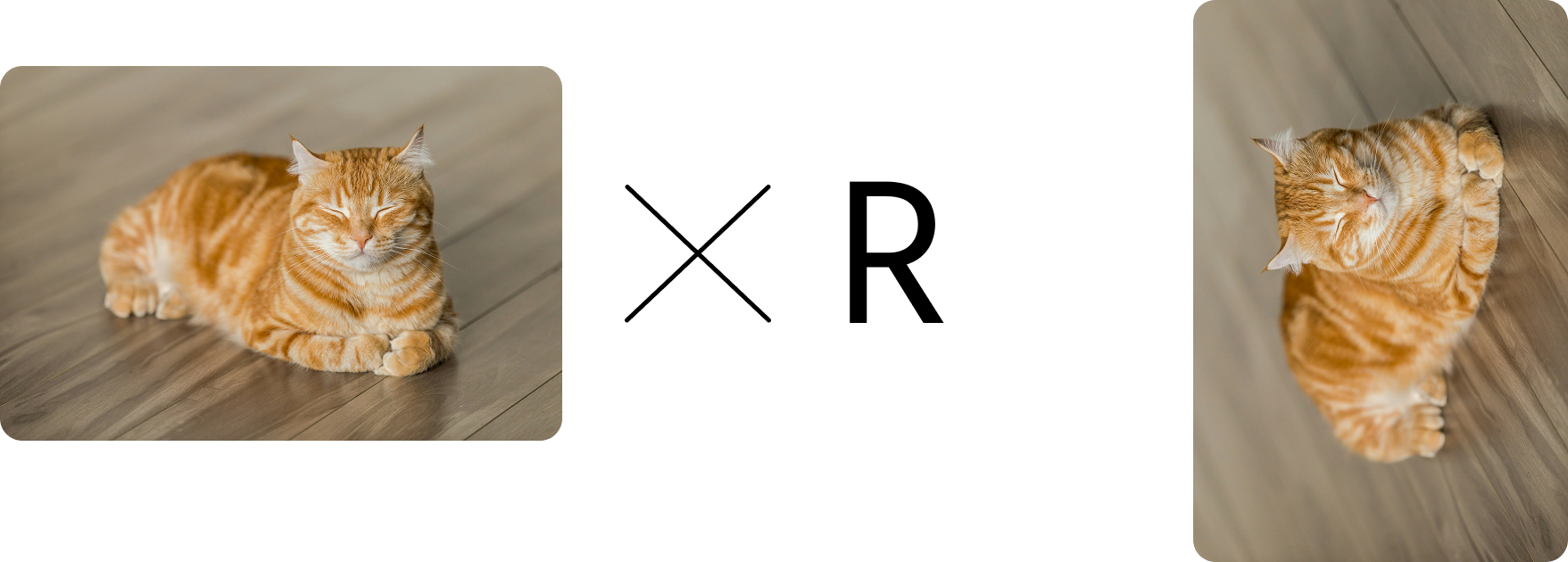
Att tillämpa denna transformation flyttar varje pixel till en ny position, vilket effektivt roterar bilden.
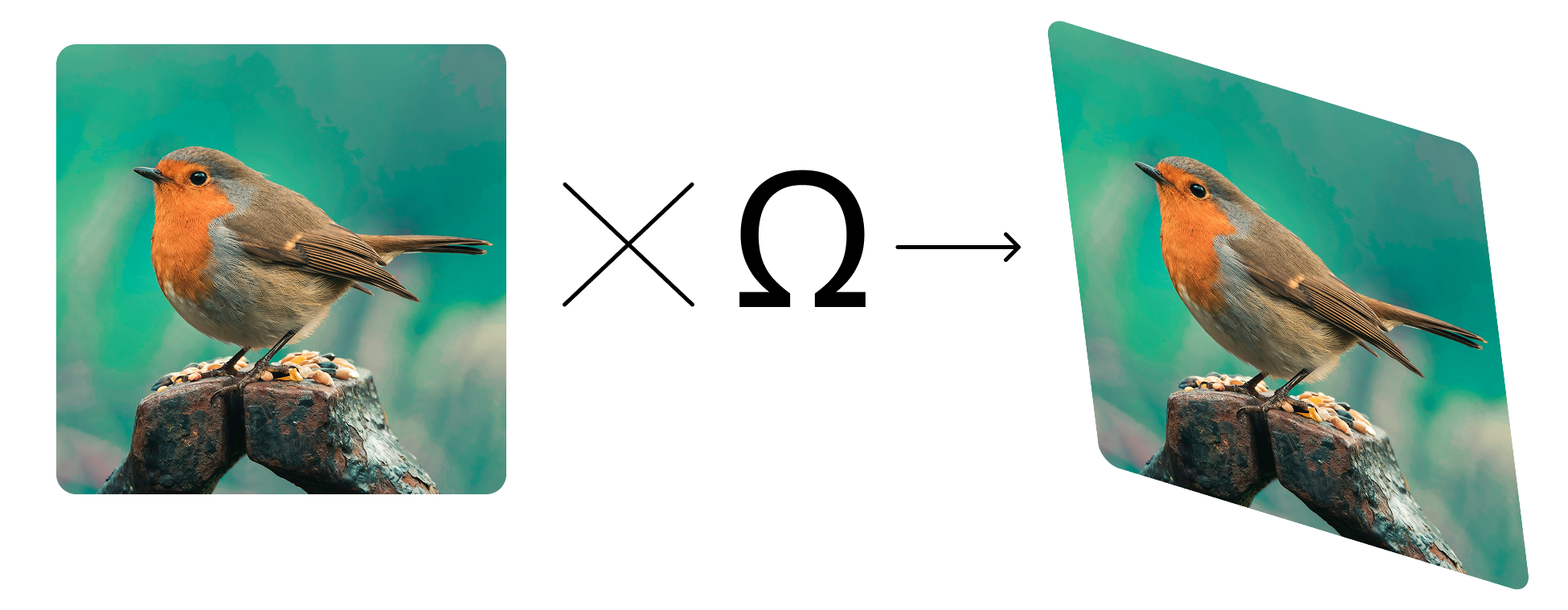
Skjuvning (förvrängning av en bild)
Skjuvning förvränger en bild genom att förskjuta dess rader eller kolumner. Transformationsmatrisen för skjuvning är:
där ωx och ωy anger hur mycket bilden förskjuts horisontellt och vertikalt. Förskjutning av en bild med 30 % horisontellt och 20 % vertikalt:
Varför linjär algebra är viktig inom datorseende
Linjär algebra utgör grunden för många bildbehandlingstekniker, inklusive:
- Objektigenkänning (avgränsningsrutor bygger på transformationer);
- Ansiktsigenkänning (egenvektorer och PCA för funktionsutvinning);
- Bildförbättring (filtrering använder matris-konvolutioner);
- Neurala nätverk (vikter lagras som matriser).
Genom att förstå dessa grundläggande operationer kan vi effektivt manipulera bilder och utveckla mer avancerade datorseendetillämpningar.
Tack för dina kommentarer!
Fråga AI
Fråga AI

Fråga vad du vill eller prova någon av de föreslagna frågorna för att starta vårt samtal
Linjär Algebra för Bildmanipulation
Linjär algebra spelar en avgörande roll inom bildbehandling. Eftersom digitala bilder representeras som matriser av pixelvärden kan matematiska operationer såsom transformationer, skalning och rotationer utföras med hjälp av matrismultiplikationer. Här följer en genomgång av de grundläggande linjära algebraiska begreppen som används inom datorseende.
Bildrepresentation som matriser
En digital bild är i grunden ett rutnät av pixlar, där varje pixel har ett intensitetsvärde. I gråskalebilder är detta en 2D-matris, där varje post motsvarar en ljusstyrkenivå (0 för svart, 255 för vitt). Till exempel kan en enkel 6×6 gråskalebild se ut så här:
Färgbilder å andra sidan är 3D-matriser (även kallade tensorer), med separata lager för Röd, Grön och Blå (RGB).
En tensor är en allmän term för en flerdimensionell matris av tal. Vektorer (1D) och matriser (2D) är speciella fall av tensorer. Generellt kan tensorer ha godtyckligt antal dimensioner och fungerar som grundläggande struktur för att representera data i många datorseende- och maskininlärningsapplikationer.
Gråskalebilder har formen (60, 60), vilket innebär att de består av 60 rader och 60 kolumner, där varje pixel representerar ett enda intensitetsvärde – det finns endast en färgkanal. Däremot har RGB-bilder formen (60, 60, 3), vilket anger samma rumsliga upplösning (60 rader och 60 kolumner), men med en extra dimension för färg: varje pixel innehåller tre värden som motsvarar de röda, gröna och blå kanalerna som tillsammans definierar den fullständiga färgen vid den punkten.
Linjära algebraiska transformationer för bildbehandling
Flera bildmanipulationer bygger på matrismatematik, vilket gör linjär algebra till en central del av datorseende. Här följer de vanligaste transformationerna.
Bildskalning (ändring av storlek)
Skalning ökar eller minskar storleken på en bild. Detta uppnås genom att multiplicera bildmatrisen med en skalningsmatris:
där sx och sy är skalningsfaktorer för bredd respektive höjd. Exempel: Om vi vill fördubbla storleken på en bild använder vi:
Multiplicera denna matris med varje pixels koordinater skalar upp bilden.
Bildrotation
För att rotera en bild med en vinkel θ används en rotationsmatris:
Till exempel innebär en rotation av en bild 90 grader medurs att använda:
Att tillämpa denna transformation flyttar varje pixel till en ny position, vilket effektivt roterar bilden.
Skjuvning (förvrängning av en bild)
Skjuvning förvränger en bild genom att förskjuta dess rader eller kolumner. Transformationsmatrisen för skjuvning är:
där ωx och ωy anger hur mycket bilden förskjuts horisontellt och vertikalt. Förskjutning av en bild med 30 % horisontellt och 20 % vertikalt:
Varför linjär algebra är viktig inom datorseende
Linjär algebra utgör grunden för många bildbehandlingstekniker, inklusive:
- Objektigenkänning (avgränsningsrutor bygger på transformationer);
- Ansiktsigenkänning (egenvektorer och PCA för funktionsutvinning);
- Bildförbättring (filtrering använder matris-konvolutioner);
- Neurala nätverk (vikter lagras som matriser).
Genom att förstå dessa grundläggande operationer kan vi effektivt manipulera bilder och utveckla mer avancerade datorseendetillämpningar.
Tack för dina kommentarer!
