Icke-Maximal Undertryckning (NMS)
Svep för att visa menyn
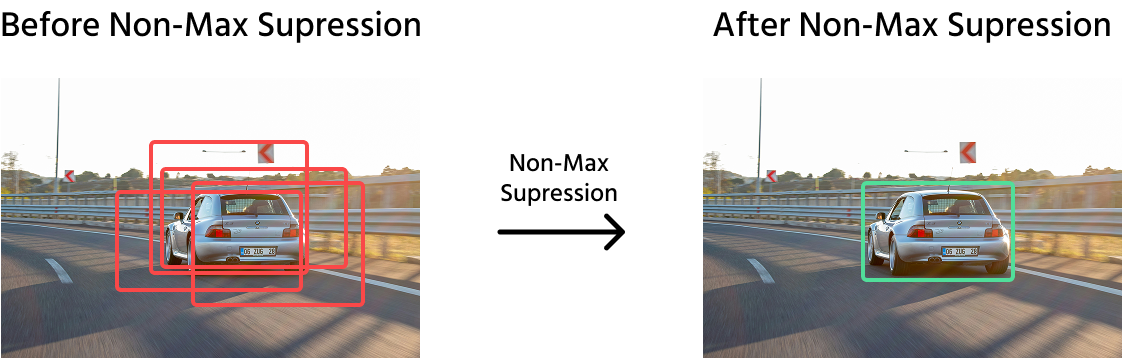
Objektdetektionsmodeller förutspår ofta flera överlappande avgränsningsrutor för samma objekt. Detta sker eftersom modeller skannar en bild på olika skalor och positioner, vilket leder till redundanta förutsägelser. Non-Max Suppression (NMS) är ett avgörande efterbearbetningssteg som förfinar dessa detektioner genom att välja de mest relevanta avgränsningsrutorna och samtidigt ta bort onödiga.
Varför flera överlappande rutor uppstår
Objektdetektorer förutspår flera avgränsningsrutor för ett enskilt objekt på grund av:
- Anchor boxes: vissa modeller, såsom Faster R-CNN och YOLO, använder fördefinierade anchor boxes i olika storlekar, vilket leder till flera detektioner av samma objekt;
- Sliding window-metoder: vissa detektionsmetoder skannar en bild i små regioner, vilket orsakar upprepade detektioner av ett objekt inom överlappande områden;
- Höga konfidenspoäng: modellen tilldelar konfidenspoäng till varje förutsägelse, och liknande förutsägelser med höga poäng kan överlappa avsevärt.
Om dessa redundanta rutor inte filtreras bort kan de påverka objektdetektionens prestanda negativt genom att öka den beräkningsmässiga komplexiteten och göra objektantalet opålitligt.
Hur Non-Max Suppression fungerar
NMS används för att ta bort dubbla detektioner och behålla den mest tillförlitliga avgränsningsrutan. Processen följer dessa steg:
- Poängsortering: ordna alla förutsagda avgränsningsrutor i fallande ordning baserat på deras tillförlitlighetspoäng;
- Val av bästa ruta: välj rutan med högst poäng och lägg till den i den slutliga listan över detektioner;
- IoU-beräkning: beräkna Intersection Over Union (IoU) mellan den valda rutan och alla återstående rutor;
- Tröskelvärde: undertryck (ta bort) rutor som har ett IoU över ett angivet tröskelvärde (t.ex. 0,5) eftersom de sannolikt representerar samma objekt;
- Upprepa: fortsätt processen för nästa ruta med högst poäng tills alla rutor har behandlats.
import numpy as np
def non_max_suppression(boxes, scores, iou_threshold=0.5):
# Sort boxes by confidence scores in descending order
sorted_indices = np.argsort(scores)[::-1]
selected_boxes = []
while len(sorted_indices) > 0:
# Pick the highest confidence box
best_idx = sorted_indices[0]
selected_boxes.append(boxes[best_idx])
# Compute IoU with the remaining boxes
remaining_boxes = boxes[sorted_indices[1:]]
ious = np.array([compute_iou(boxes[best_idx], box) for box in remaining_boxes])
# Suppress boxes with IoU above threshold
sorted_indices = sorted_indices[1:][ious < iou_threshold]
return selected_boxes
Soft-NMS: Ett smartare alternativ
Standard NMS tar bort alla överlappande rutor över ett visst IoU-tröskelvärde, vilket ibland kan eliminera användbara detektioner. Soft-NMS förbättrar detta genom att minska tillförlitlighetspoängen för överlappande rutor istället för att ta bort dem helt. Denna metod möjliggör en mjukare undertryckningsprocess och kan förbättra detektionsprestandan i täta objektscenarier.
Viktiga skillnader mellan Standard NMS och Soft-NMS:
- Standard NMS: tar bort överlappande rutor över IoU-tröskelvärdet;
- Soft-NMS: minskar tillförlitlighetspoängen för överlappande rutor istället för att eliminera dem, vilket gör det mer flexibelt för att upptäcka delvis skymda objekt.
Balansera noggrannhet och hastighet i NMS
Att välja rätt IoU-tröskelvärde är avgörande:
- Högre tröskelvärden (t.ex. 0,6 - 0,7): mer aggressiv filtrering, behåller endast de mest tillförlitliga rutorna men kan missa vissa giltiga detektioner;
- Lägre tröskelvärden (t.ex. 0,3 - 0,4): behåller fler överlappande rutor, vilket kan vara användbart i trånga scener men kan öka antalet falska positiva.
Att använda optimerade implementationer, såsom TensorFlow eller OpenCV:s inbyggda NMS-funktioner, kan hjälpa till att snabba upp bearbetningen för realtidsapplikationer.
Non-Max Suppression är en viktig teknik inom objektigenkänning för att ta bort överflödiga avgränsningsrutor och förbättra modellens noggrannhet. Standard-NMS eliminerar effektivt dubbla detektioner, medan Soft-NMS förfinar processen genom att justera tillförlitlighetspoängen istället för att helt ta bort rutor. Genom att finjustera IoU-trösklar kan man hitta rätt balans mellan detektionsnoggrannhet och beräkningsprestanda.
1. Vad är huvudsyftet med Non-Max Suppression (NMS) inom objektigenkänning?
2. Hur avgör standard-NMS vilka avgränsningsrutor som ska undertryckas?
3. Vad är den viktigaste skillnaden mellan standard-NMS och Soft-NMS?
Tack för dina kommentarer!
Fråga AI
Fråga AI

Fråga vad du vill eller prova någon av de föreslagna frågorna för att starta vårt samtal
