Огляд Моделі YOLO
Свайпніть щоб показати меню
Алгоритм YOLO (You Only Look Once) — це швидка та ефективна модель для виявлення об'єктів. На відміну від традиційних підходів, таких як R-CNN, які використовують кілька етапів, YOLO обробляє все зображення за один прохід, що робить його ідеальним для застосування в режимі реального часу.
Відмінності YOLO від підходів R-CNN
Традиційні методи виявлення об'єктів, такі як R-CNN та його варіанти, використовують двоступеневий конвеєр: спочатку генеруються регіональні пропозиції, а потім класифікується кожен запропонований регіон. Хоча цей підхід є ефективним, він вимагає значних обчислювальних ресурсів і уповільнює процес інференсу, що робить його менш придатним для задач у реальному часі.
YOLO (You Only Look Once) застосовує принципово інший підхід. Він ділить вхідне зображення на ґратку та прогнозує координати обмежувальних рамок і ймовірності класів для кожної клітини за один прямий прохід. Така архітектура розглядає задачу виявлення об'єктів як єдину задачу регресії, що дозволяє YOLO досягати високої швидкодії в реальному часі.
На відміну від методів на основі R-CNN, які фокусуються лише на локальних ділянках, YOLO обробляє все зображення одночасно, що дає змогу враховувати глобальний контекст. Це забезпечує кращу ефективність при виявленні декількох або перекриваючихся об'єктів, зберігаючи високу швидкість та точність.
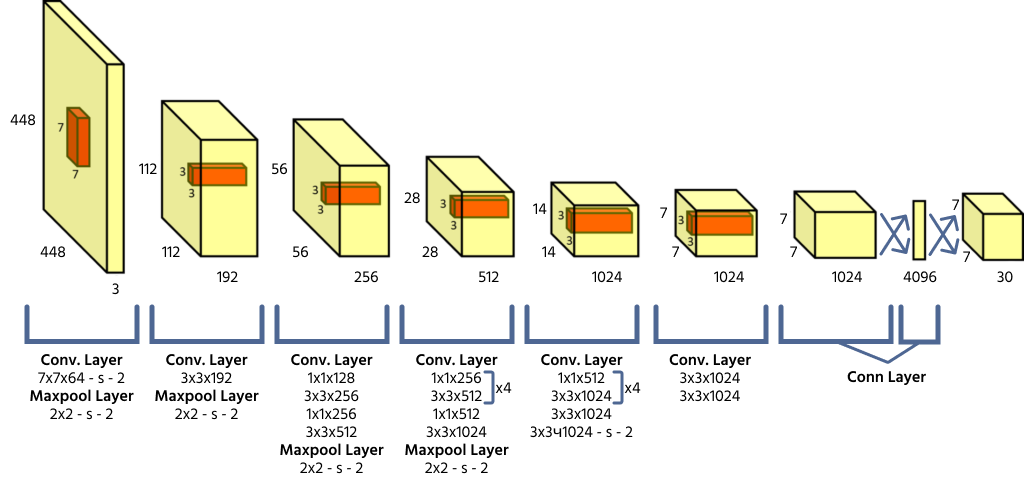
Архітектура YOLO та прогнозування на основі ґратки
YOLO розбиває вхідне зображення на ґратку S × S, де кожна клітина відповідає за виявлення об'єктів, центр яких знаходиться всередині неї. Кожна клітина прогнозує координати обмежувальної рамки (x, y, ширина, висота), оцінку впевненості щодо наявності об'єкта та ймовірності класів. Оскільки YOLO обробляє все зображення за один прямий прохід, він є надзвичайно ефективним у порівнянні з попередніми моделями для виявлення об'єктів.
Функція втрат і оцінки впевненості класу
YOLO оптимізує точність виявлення за допомогою спеціальної функції втрат, яка включає:
- Втрати локалізації: вимірюють точність обмежувальних рамок;
- Втрати впевненості: гарантують, що передбачення правильно вказують наявність об'єкта;
- Втрати класифікації: оцінюють, наскільки добре передбачений клас відповідає істинному класу.
Для покращення результатів YOLO застосовує якорні рамки та пригнічення немаксимальних значень (NMS) для видалення надлишкових виявлень.
Переваги YOLO: компроміс між швидкістю та точністю
Головна перевага YOLO — це швидкість. Оскільки виявлення відбувається за один прохід, YOLO значно швидший за методи на основі R-CNN, що робить його придатним для задач реального часу, таких як автономне водіння та відеоспостереження. Проте ранні версії YOLO мали труднощі з виявленням малих об'єктів, що було покращено в наступних версіях.
YOLO: Коротка історія
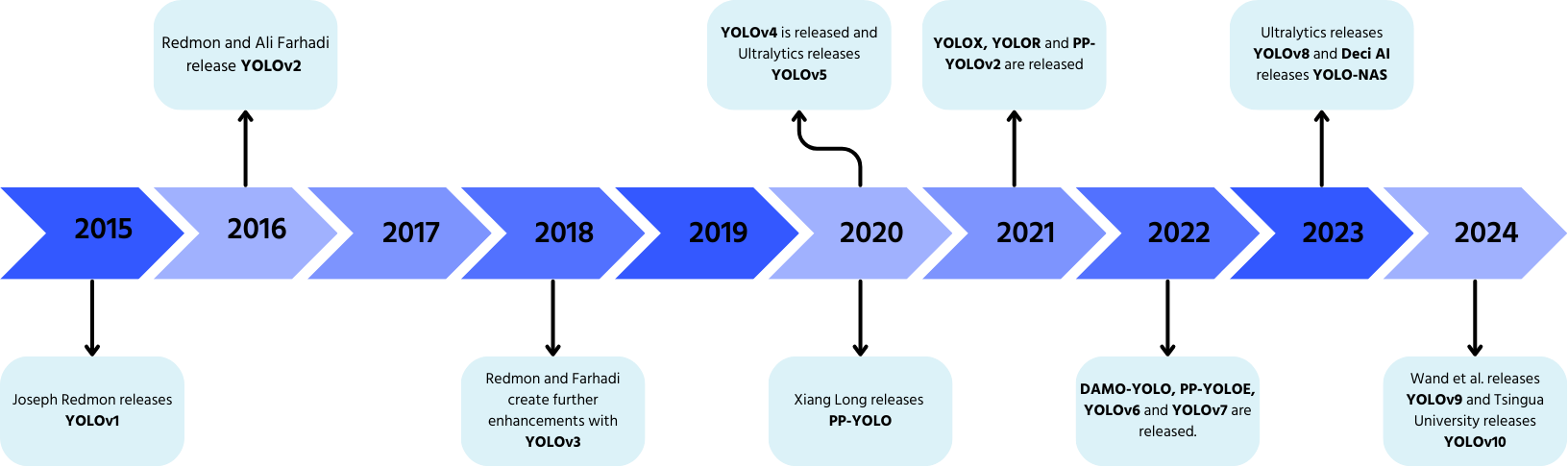
YOLO, розроблений Джозефом Редмоном та Алі Фархаді у 2015 році, здійснив революцію в задачах детекції об'єктів завдяки обробці зображення за один прохід.
- YOLOv2 (2016): додано пакетну нормалізацію, якірні бокси та кластеризацію розмірів;
- YOLOv3 (2018): впроваджено ефективніший бекбон, декілька якірів та просторове пірамідальне пулінгування;
- YOLOv4 (2020): додано мозаїчну аугментацію даних, anchor-free головку детекції та нову функцію втрат;
- YOLOv5: покращено продуктивність завдяки оптимізації гіперпараметрів, відстеженню експериментів та автоматичному експорту;
- YOLOv6 (2022): відкритий код від Meituan, використовується в автономних роботах-доставниках;
- YOLOv7: розширено можливості, включаючи оцінку поз;
- YOLOv8 (2023): підвищено швидкість, гнучкість та ефективність для задач комп'ютерного зору;
- YOLOv9: впроваджено Програмовану Градієнтну Інформацію (PGI) та Універсальну Ефективну Мережу Агрегації Шарів (GELAN);
- YOLOv10: розроблено університетом Цінхуа, усунено Non-Maximum Suppression (NMS) завдяки End-to-End головці детекції;
- YOLOv11: найновіша модель з найкращими показниками у задачах детекції об'єктів, сегментації та класифікації.
Дякуємо за ваш відгук!
Запитати АІ
Запитати АІ

Запитайте про що завгодно або спробуйте одне із запропонованих запитань, щоб почати наш чат
