Виявлення Об'єктів
Свайпніть щоб показати меню
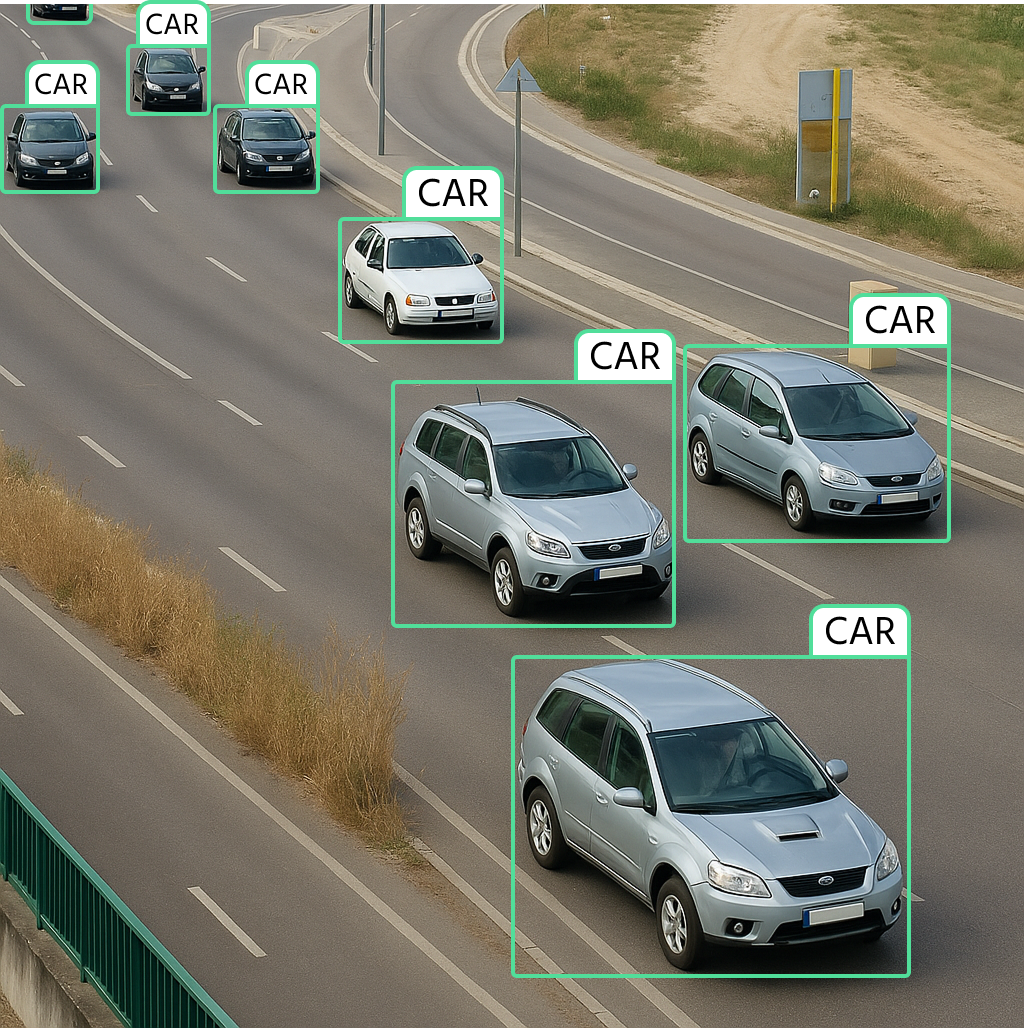
Виявлення об'єктів є важливим кроком уперед у порівнянні з класифікацією та локалізацією зображень. Якщо класифікація визначає, який об'єкт присутній на зображенні, а локалізація ідентифікує місце розташування одного об'єкта, то виявлення об'єктів розширює ці можливості, дозволяючи розпізнавати кілька об'єктів та їх розташування на одному зображенні.
Чим відрізняється виявлення об'єктів?
На відміну від класифікації, яка призначає одне значення для всього зображення, виявлення об'єктів включає класифікацію та локалізацію для кількох об'єктів. Модель для виявлення повинна передбачати обмежувальні рамки для кожного об'єкта та правильно їх класифікувати. Це робить задачу виявлення об'єктів складнішою та більш ресурсоємною порівняно з простою класифікацією.
Підхід ковзного вікна та його обмеження
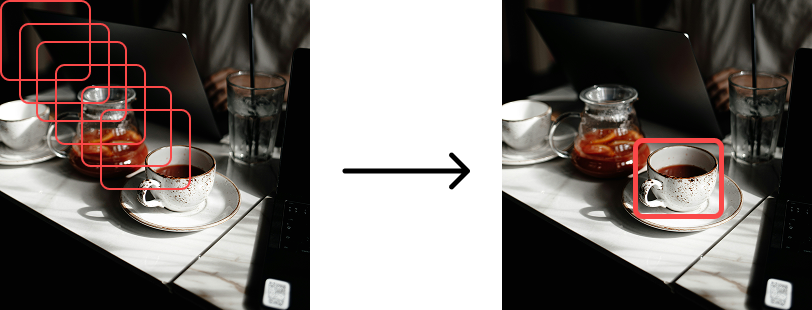
Традиційним методом для виявлення об'єктів є підхід ковзного вікна, коли вікно фіксованого розміру переміщується по зображенню для класифікації кожної ділянки. Хоча цей підхід концептуально простий, він має кілька обмежень:
- Висока обчислювальна складність: необхідно сканувати зображення на різних масштабах і позиціях, що призводить до значного часу обробки;
- Жорсткі розміри вікна: об'єкти відрізняються за розміром і співвідношенням сторін, тому фіксовані вікна є неефективними;
- Надлишкові обчислення: перекривання вікон призводить до багаторазової обробки схожих ділянок зображення, що марнує ресурси.
Через ці неефективності методи виявлення об'єктів на основі глибокого навчання переважно замінили підхід ковзного вікна.
Методи на основі регіонів: Selective Search та мережі пропозицій регіонів (RPN)
Для підвищення ефективності методи на основі регіонів пропонують регіони інтересу (RoI) замість сканування всього зображення. Два основних підходи:
-
Selective search: традиційний підхід, що групує схожі пікселі у регіональні пропозиції, зменшуючи кількість передбачень обмежувальних рамок. Хоча цей метод ефективніший за ковзні вікна, він все ще повільний;
-
Мережі пропозицій регіонів (RPN): використовуються у Faster R-CNN, RPN застосовують нейронну мережу для безпосереднього генерування потенційних регіонів об'єктів, що суттєво підвищує швидкість і точність у порівнянні з selective search.
Ранні підходи на основі глибокого навчання
Глибоке навчання здійснило революцію в задачі детекції об'єктів, впровадивши згорткові нейронні мережі (CNN) у процеси виявлення. Серед перших моделей виділяють:
-
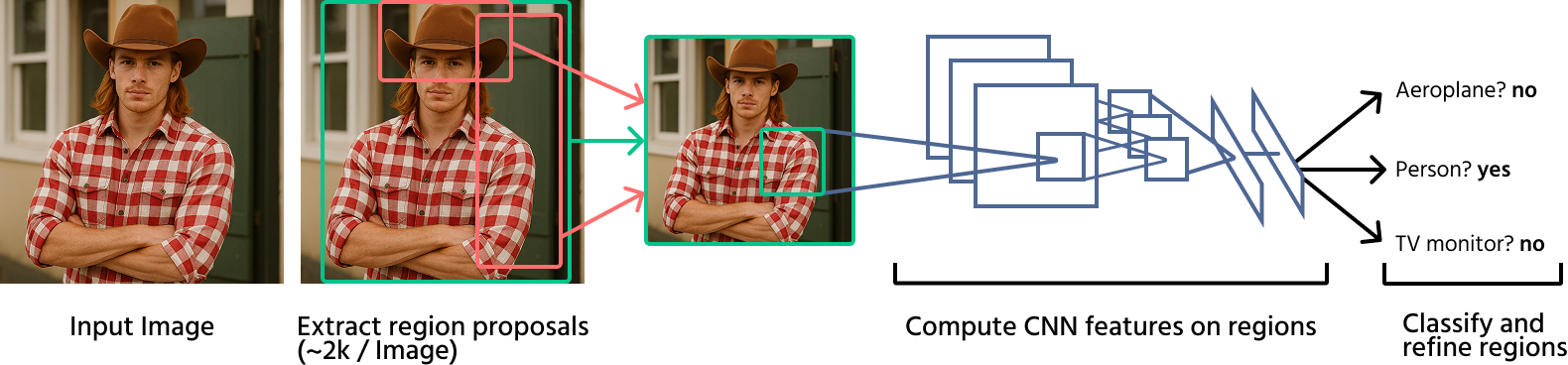
R-CNN (Regions with CNNs): цей метод застосовує CNN до кожної регіональної пропозиції, згенерованої за допомогою селективного пошуку. Хоча точність значно вища за традиційні методи, обчислення є повільними через багаторазове використання CNN;
-
Fast R-CNN: удосконалення R-CNN, ця модель спочатку обробляє все зображення за допомогою CNN, а потім використовує RoI-пулінг для виділення ознак для класифікації, що прискорює детекцію;
-
Faster R-CNN: впроваджує мережі регіональних пропозицій (RPN), які замінюють селективний пошук, роблячи детекцію об'єктів швидшою та точнішою завдяки інтеграції генерації регіональних пропозицій у саму нейронну мережу.
Детекція об'єктів базується на класифікації та локалізації, дозволяючи моделям розпізнавати кілька об'єктів на одному зображенні. Традиційні методи, такі як ковзні вікна, були замінені більш ефективними регіон-орієнтованими підходами, такими як R-CNN та його наступники. Faster R-CNN із використанням мереж регіональних пропозицій є значним кроком до реального часу та високої точності детекції об'єктів. У подальшому більш сучасні техніки, такі як YOLO та SSD, ще більше вдосконалять швидкість і ефективність виявлення.
1. Яка основна перевага Faster R-CNN над Fast R-CNN?
2. Чому підхід зі скользячим вікном є неефективним для виявлення об'єктів?
3. Який із наведених методів є методом виявлення об'єктів на основі глибокого навчання?
Дякуємо за ваш відгук!
Запитати АІ
Запитати АІ

Запитайте про що завгодно або спробуйте одне із запропонованих запитань, щоб почати наш чат
